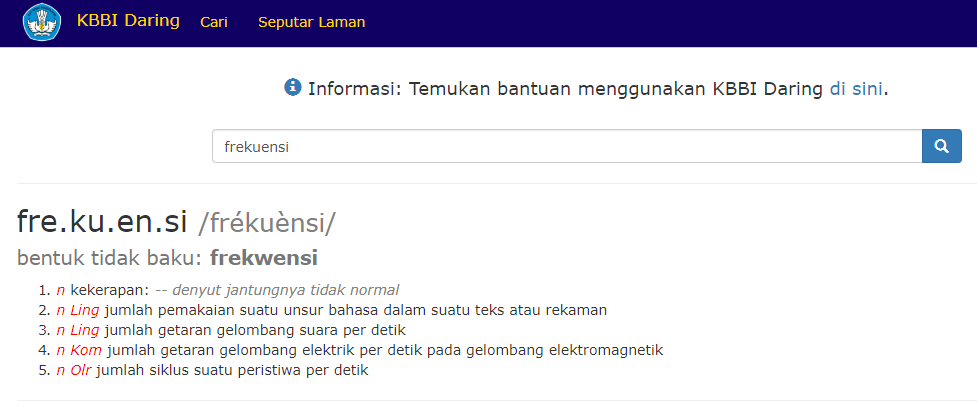
Di artikel sebelum ini sudah dipaparkan mengenai pengenalan dasar-dasar PWM melalui komponen pembentuknya yaitu frekuensi, periode, dan duty cycle (link). Kemudian di artikel lain juga sudah dicontohkan bagaimana mencari nilai rata-rata (average) maupun rms (root-mean-square) (link). Lalu sudah dicontohkan bagaimana mewujudkan sistem penghasil PWM dengan menggunakan perangkat digital yang itu sistem Arduino yang didalamnya berintikan mikrokontoler. Di artikel itu (link) juga dicontohkan perbandingan antara dua cara pembangkitan PWM, satu dengan cara penyakelaran manual sedang yang lain dengan cara menggunakan pemanggilan fungsi. Pada artikel itu pula disampaikan alur belajar yang bisa dilakukan untuk memahami sesuatu, dengan menaikkan kompleksitas secara bertahap.
Setelah memahami konsep-konsep dasarnya, kita bisa melanjutkan ke wilayah praktik/penggunaan. Dalam penggunaan ‘sehari-hari’ kita tidak harus hanya bergantung pada satu komponen/alat/sistem. Misalnya anda tidak selalu harus mempergunakan Arduino Uno untuk membangkitkan PWM secara digital. Terutama di era perdangan dan transportasi yang semakin lancar dan bebas seperti ini. Telah banyak modul impor dari pabrikan di luar negeri dengan harga yang relatif murah tersedia di beberapa toko online.
Misalnya yang sudah banyak dijual di toko-toko online di Indonesia adalah: “2 Channel PWM Generator Module Pulse Frequency Duty Cycle Adjustable Square Wave Rectangle Signal Generator For Stepper Motor Driver“. Barang ini dijual dengan beberapa nama, dan bahkan ada beberapa varian. Salah satunya adalah yang seperti Gambar 1 berikut.
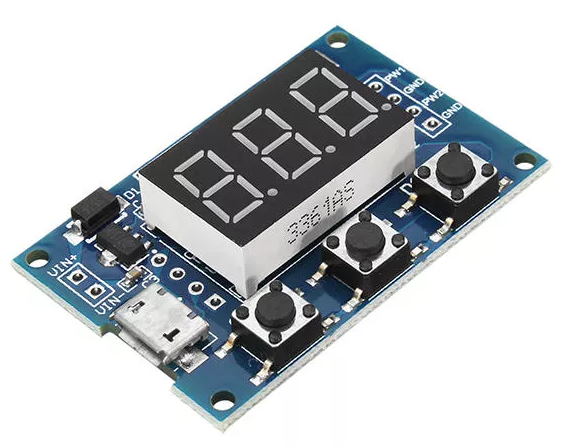 Gambar 1. Two channel PWM generator
Gambar 1. Two channel PWM generator
Salah satu kemudahan varian ini adalah sudah disediakannya micro USB 2.0 port untuk masukan daya. Di dekatnya disediakan juga tempat untuk masukan catu daya jika hendak mempergunakan kabel atau male pin header. Sedangkan untuk pengaturan operasi dari alat ini dilakukan melalui tiga push button (tactile switch). Yang paling kiri mengatur mode, yang tengah untuk menaikkan nilai, yang paling kanan untuk menurunkan nilai. Pengguna alat ini bisa mengatur frekuensi dan duty cycle dari masing-masing pulse train.
Gambar 2. Two channel PWM generator
Di Gambar 2 terlihat empat lubang tempat male pin header bisa dipasang. Keempatya keluaran untuk dua sinyal PWM yang independen/terpisah, yaitu PW1 dan PW2.
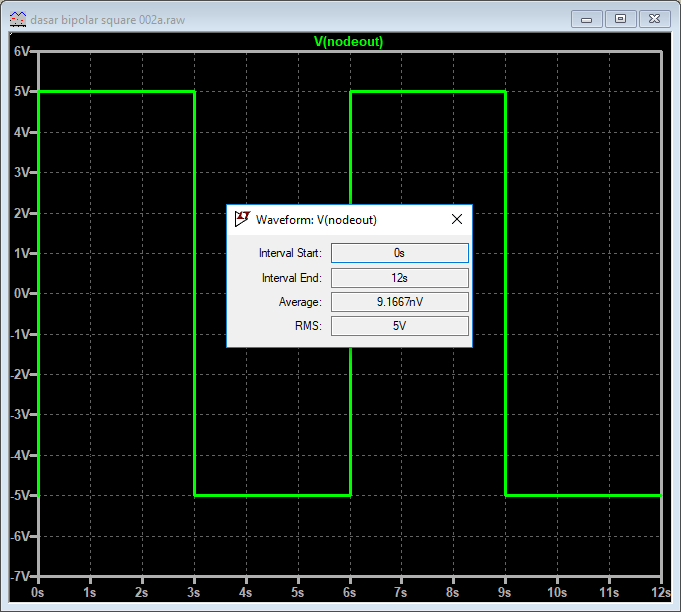
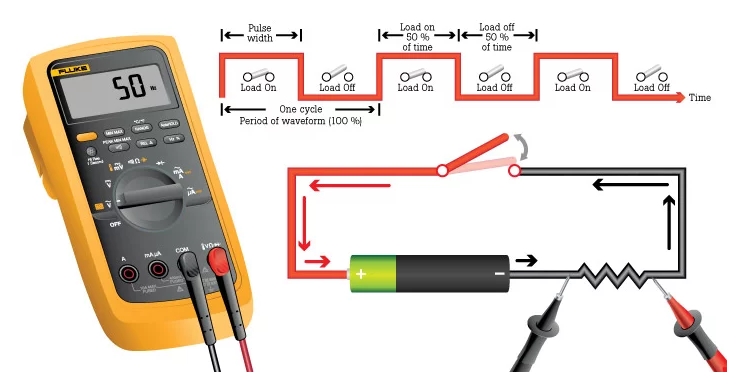
[/su_panel] [su_panel border=”3px solid #00e600″ radius=”10″]Untuk dapat mengerti sistem penyakelaran BJT (Bipolar Junction Transistor) NPN menggunakan PWM generator ini, saya mulai dari cara pengoperasian alat pembangkit sinyalnya terlebih dahulu.
 Gambar 3. Tiga tombol pengatur operasi PWM generator
Gambar 3. Tiga tombol pengatur operasi PWM generator
Pada Gambar 3, tombol/sakelar 1 disediakan untuk mengatur mode operasi alat ini. Di pengaturan dasar terdapat empat pilihan mode pengaturan untuk dua kanal PWM yang independen. Tiap kali tombol 1 ditekan singkat, mode akan berpindah. Jika sampai ke mode yang terakhir, maka akan kembali ke mode yang pertama, demikian seterusnya.
Untuk kanal sinyal 1, tampilan FA1 adalah untuk mengatur besar frekuensi PWM1. Tombol 2 dipakai untuk menaikkan nilai frekuensi sesuai yang diinginkan dan tombol 3 untuk menurunkan. Kedua tombol itu dapat ditekan sesaat untuk menaikkan satu nilai/angka, tetapi dapat juga ditekan-tahan untuk menaikkan/merunkan nilai terus menerus/kontinu sampai tombol dilepas. Setelah mode frekuensi FA1 sekali penekanan lagi yang singkat pada tombol 1 akan memasukkan ke mode du1, yaitu mode pengaturan untuk duty cycle kanal sinyal PWM 1. Cara menaikkan/menurunkan nilai duty cycle sama dengan cara untuk frekuensi. Berikutnya, penekanan singkat sekali lagi pada tombol 1 akan membuat alat masuke ke mode FA2, pengaturan frekuensi yang terpisah untuk kanal sinyal 2 PWM. Cara pengaturannya sama dengan FA1. Berikutnya yang terakhir adalah du2, yaitu pengaturan duty cycle untuk kanal sinyal 2 PWM. Cara pengaturan untuk mengubah nilai/angka juga sama dengan mode yang lain.
Alat ini mampu membangkitkan sinyal PWM dari 0 Hz sampai 150 kHz. Tetapi pada pengaturan dasar anda hanya dapat melihat indikator angka 999, yang mengindikasikan 999 Hz. Bagaimana cara menghasilkan gelombang PWM dengan frekuensi yang lebih tinggi?
Caranya adalah pada saat sudah berada pada mode frekuensi (FA1/FA2), tekan-tahan tombol 1 agak lama. Misalnya saat tampilan berupa angka 999 (bisa digeneralisir dengan notasi xxx), ketika tombol 1 dilepas setelah ditekan-tahan sesaat maka tampilan akan berubah menjadi xx.x. Angkanya tidak harus sama dengan angka pada rentang frekuensi sebelumnya. Kalau dinaikkan sampai maksimum pada rentang itu, indikatornya akan menjadi 99.9. Rentang terakhir yang didapat dengan tekan-tahan tombol 1 adalah x.x.x., dengan nilai maksimum 1.5.0. yang artinya 150 kHz.
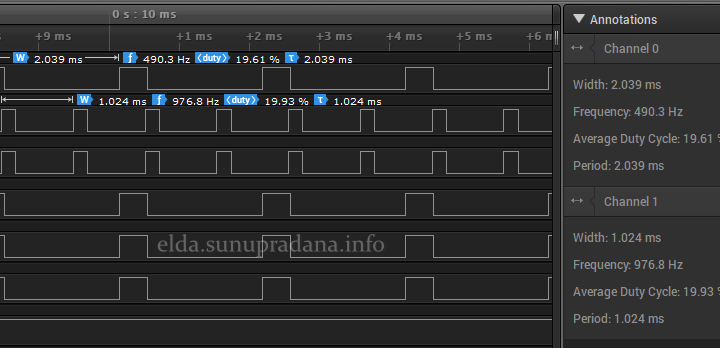
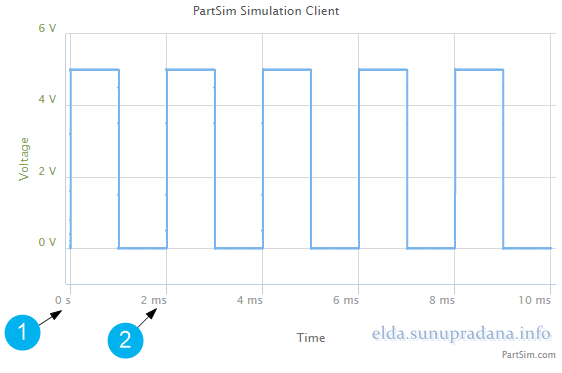
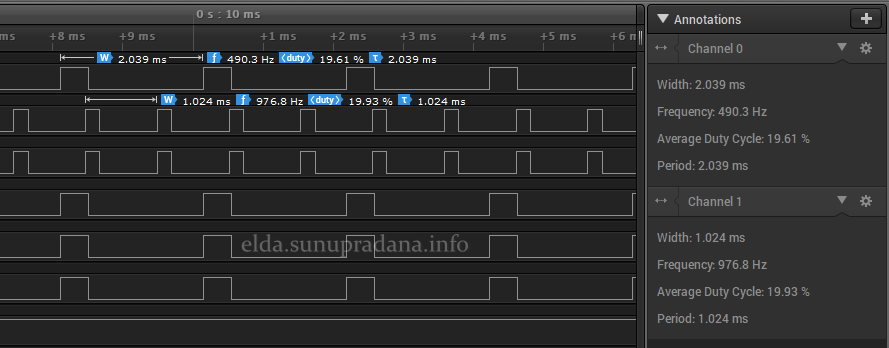
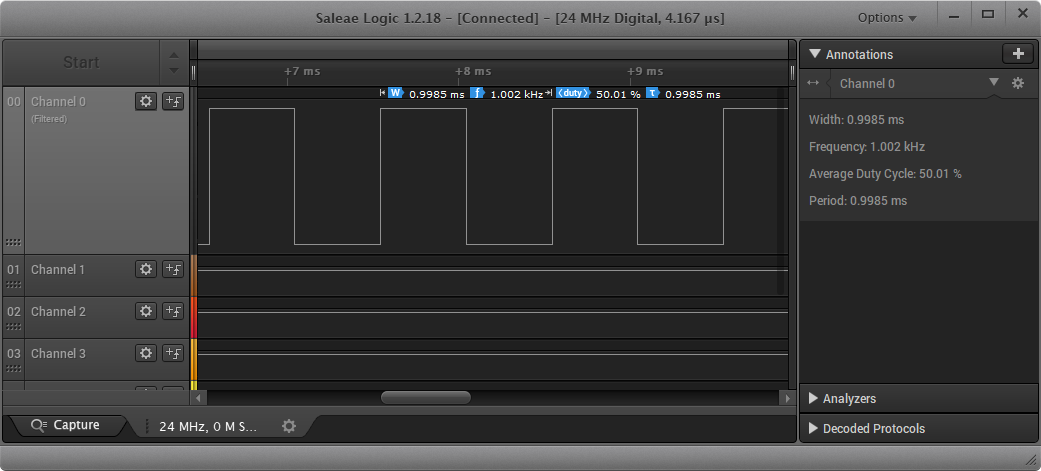
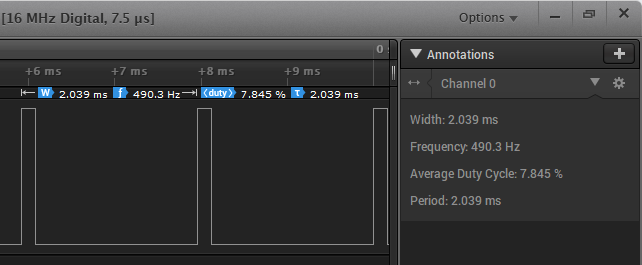
Berikut adalah beberapa capture hasil pengukuran dengan logic analyzer. Perhatikan bahwa nilainya tidak selalu sama dengan nilai nominal.
 Gambar 4. [ Klik pada gambar untuk memperbesar tampilan ]
Gambar 4. [ Klik pada gambar untuk memperbesar tampilan ]
Gambar 4 adalah tampilan saat indikator alat PWM generator menunjukkan FA1 sebesar 999, dan du1 50. Nilai ini seharusnya menunjukkan keluaran sebesar 999 Hz dengan duty cycle sebesar 50%. Tetapi logic analyzer dengan pengaturan sample rate 20 MS/s, sebanyak 100 samples, menunjukkan hasil yang berbeda. Frekuensi sebesar 1,002 kHz dengan duty cycle sebesar 50,01%.
 Gambar 5. [ Klik pada gambar untuk memperbesar tampilan ]
Gambar 5. [ Klik pada gambar untuk memperbesar tampilan ]
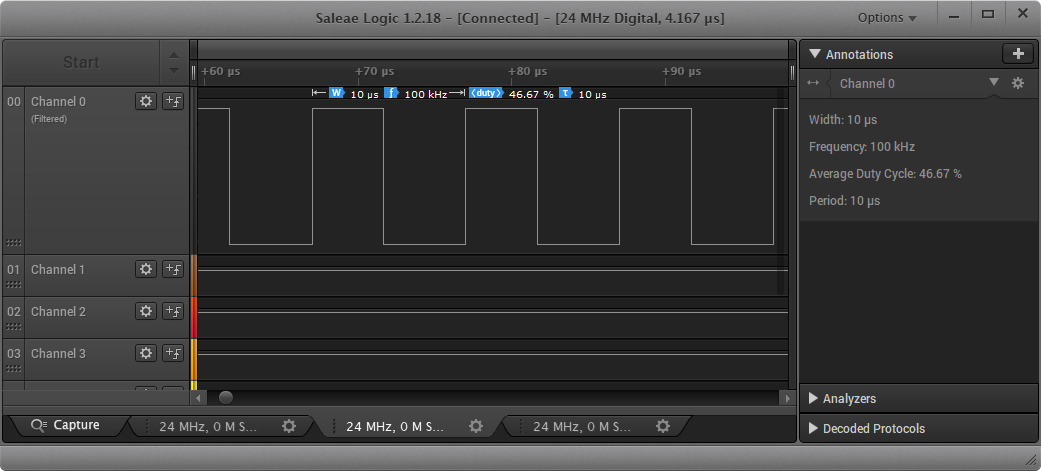
Gambar 5 adalah tampilan saat indikator alat PWM generator menunjukkan FA1 sebesar 99.9, dan du1 50. Nilai ini seharusnya menunjukkan keluaran sebesar 99.9 kHz dengan duty cycle sebesar 50%. Tetapi logic analyzer dengan pengaturan sample rate 20 MS/s, sebanyak 100 samples, menunjukkan hasil yang berbeda. Frekuensi sebesar 100 kHz dengan duty cycle sebesar 46,67%.
 Gambar 6. [ Klik pada gambar untuk memperbesar tampilan ]
Gambar 6. [ Klik pada gambar untuk memperbesar tampilan ]
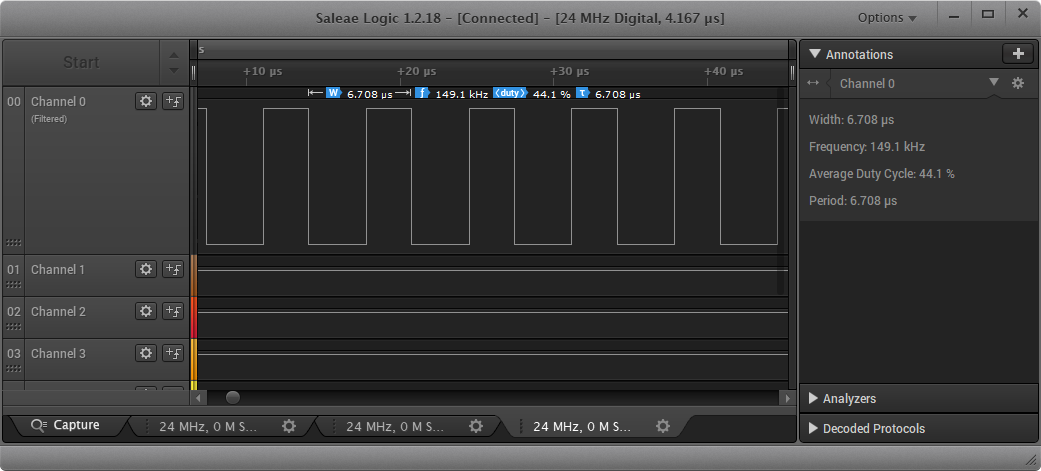
Gambar 6 adalah tampilan saat indikator alat PWM generator menunjukkan FA1 sebesar 1.5.0. , dan du1 50. Nilai ini seharusnya menunjukkan keluaran sebesar 150 kHz dengan duty cycle sebesar 50%. Tetapi logic analyzer dengan pengaturan sample rate 20 MS/s, sebanyak 100 samples, menunjukkan hasil yang berbeda. Frekuensi sebesar 149,1 kHz dengan duty cycle sebesar 44,1%.
Berikut ini adalah data yang diperoleh dari salah satu penjual alat ini di toko online di Indonesia.
[Disclaimer: Tidak ada kepentingan komersial apa pun, anda bebas mencari dari toko/sumber yang berbeda. Ini bukan promosi, hanya menampilkan data]Cara pakai, ada 3 tombol:
1. Press the [ Set ] key momentarily to switch to display four parameter values ( FR1 : frequency of PWM1 ; d U1 : duty ratio of PWM1 ; FR2 : frequency of PWM2 ; dU2 : duty ratio of PWM2 ) . The parameter name flashes.
2. Press [ Up ] and [ Down ] directly to modify the current parameter value ( long press to increase or decrease quickly ).
3. Two PWM each preset has three kinds of frequency values, the display interface in the frequency, a long press [ SET ] key once to switch, 3 uniform duty cycle frequencies are available . ( XXX: range 1Hz ~ 999Hz ; XX.X : the range of 0.1 Khz ~ 99.9Khz ; XXX : range 1Khz ~ 150 Khz )Spesifikasi:
- Tegangan: 5-30V, support micro USB 5.0V power supply
- Frequency range: 1Hz ~ 150KHz.
- Pulse width range: 0 - 100%
- Frequency accuracy: 2%.
- Output current: 30mA
- Output amplitude: default 5Vp-p (settable)
- Operating temperature range: -30 ~ +70 C
- Dimensi: 4.3 x 2.9 x 0.9 cm
Jika anda memiliki akses Internet yang lancar dan kondisi memungkinkan, saya menyarankan untuk dapat menyaksikan dan menyimak video yang bagus mengenai alat PWM generator berikut ini.
Video 1. Cara peggunaan PWM generator
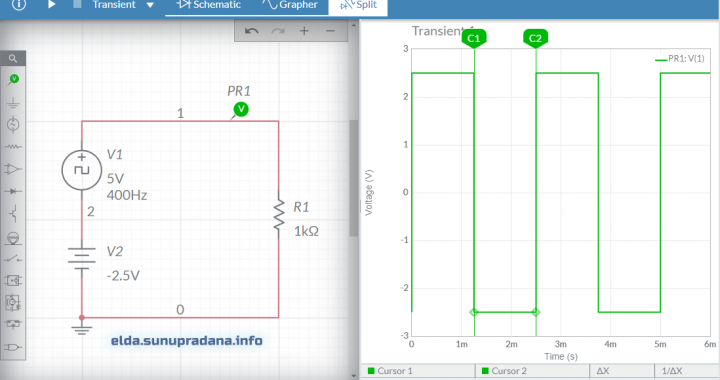
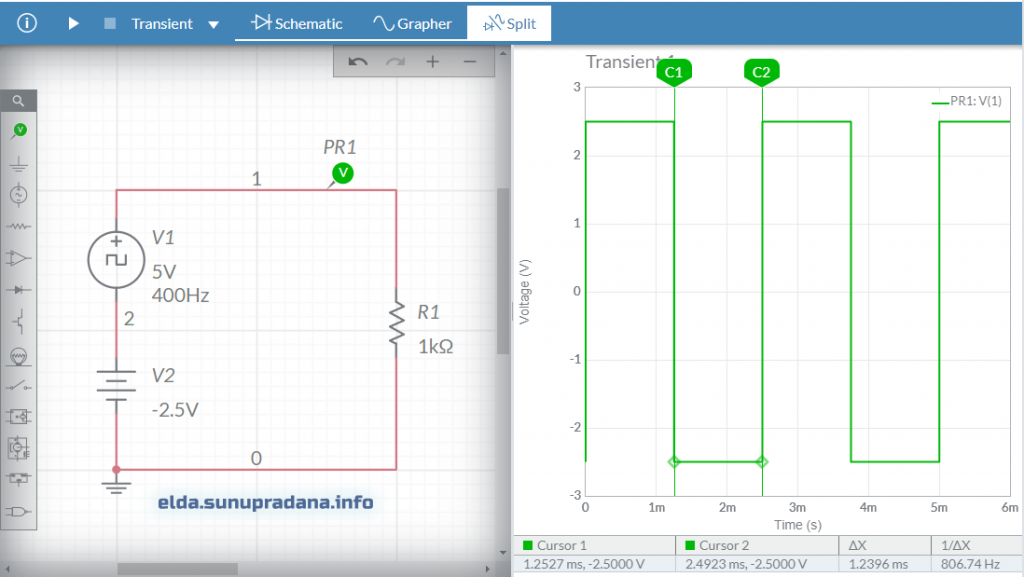
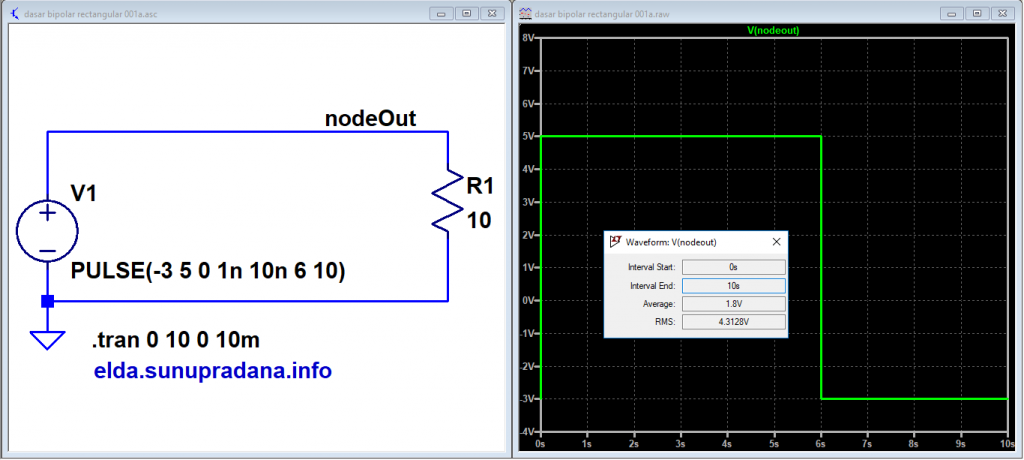
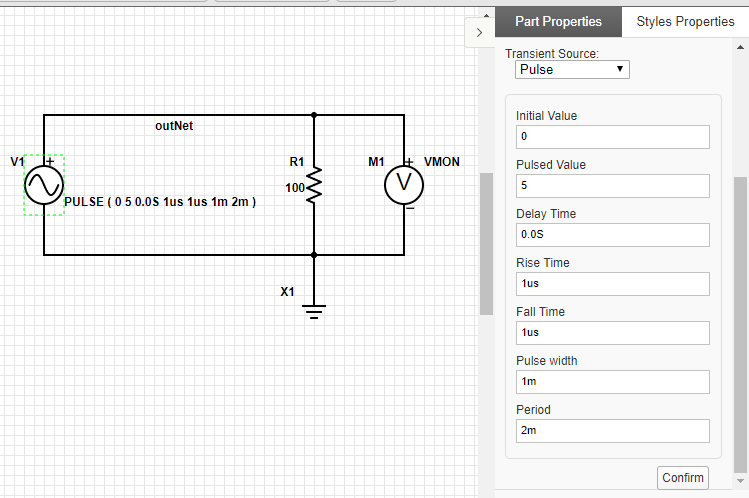
Untuk peralaran/sistem praktik seperti ini ada dua alur, yaitu alur maju dan alur mundur. Pada alur maju, engineer atau engineering technologist terlebih dahulu membuat rancangan rangkaian seperti yang saya lakukan dengan Multisim Live pada Gambar 7 di bawah ini. Alur yang kedua adalah alur mundur, yaitu kita membuat diagram rangkaian dari rangkaian/sistem yang sudah ada. Hal semacam ini lazim disebut sebagai reverse engineering.
Pada saat saya merakit cepat sistem untuk prakik BJT NPN ini sebenarnya saya berharap agar setidaknya ada hikmah lebih dari praktikum pengganti ini. Saya berharap papan praktik ini bisa juga menjadi sarana latihan reverse engineering sederhana bagi mahasiswa.
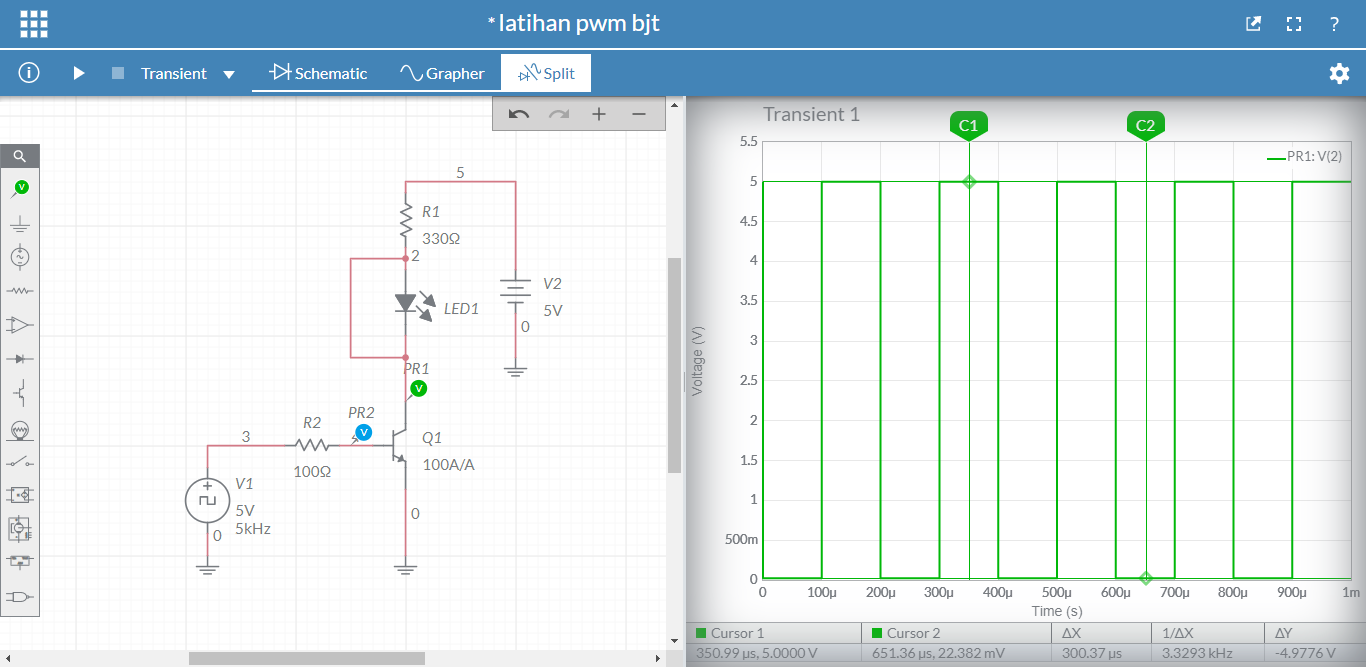
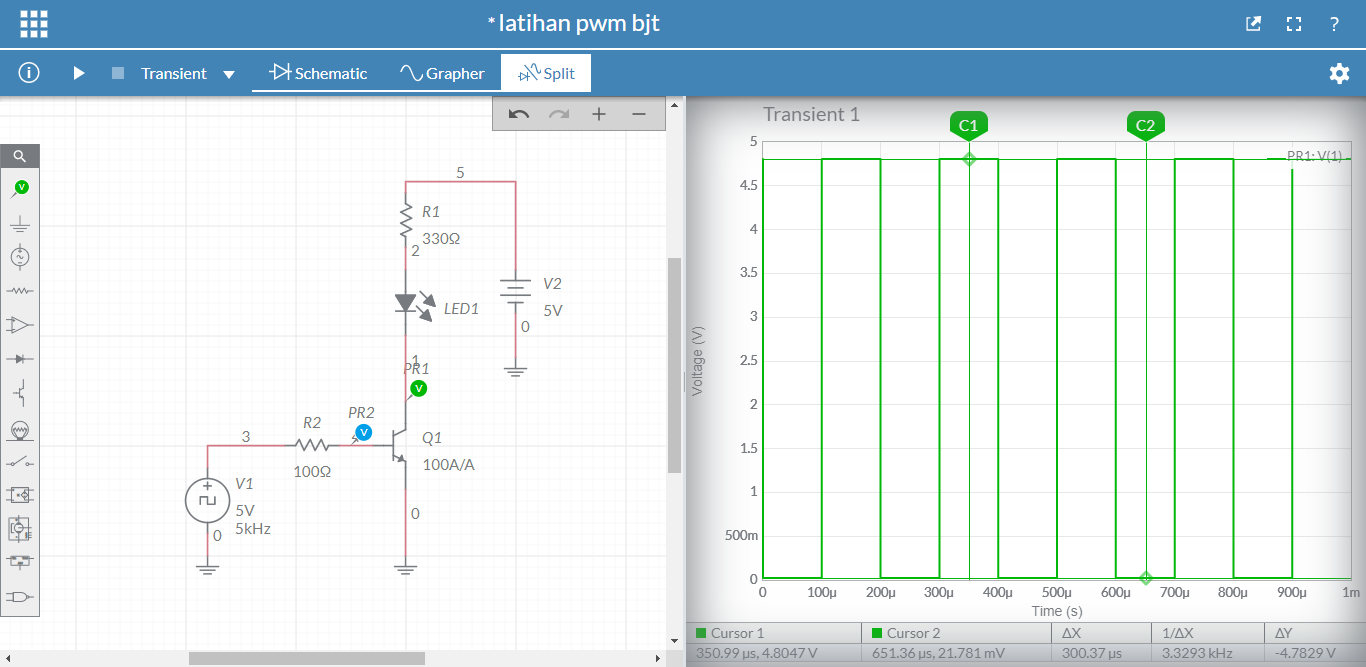 Gambar 7. Rancangan/simulasi/dokumentasi rangkaian penyakelaran BJT NPN
Gambar 7. Rancangan/simulasi/dokumentasi rangkaian penyakelaran BJT NPN
 Gambar 8. Pinout kaki BJT NPN BD139
Gambar 8. Pinout kaki BJT NPN BD139
Transistor yang dipergunakan pada papan percobaan adalah BD139. Sebagiamana standar operasi untuk pekerjaan sistem elektrikan yang mengacu pada ‘katalog’, maka untuk banyak pekerjaan dan proses belajar di sistem elektronika perlu mengacu pada datasheet (data sheet). Selain dari application note, manual, white paper dan user’s guide. Hampir seperti obat-obatan medis yang memiliki tipe obat generik, beberapa komponen dengan tipe yang sama dibuat oleh produsen yang berbeda. Misalnya beberapa datasheet BD139 dikeluarkan oleh produsen yang berbeda, oleh Semiconductor Components Industries, LLC (ON Semi/ON Semiconductor), dan oleh STMicroelectronics. Mahasiswa perlu membiasakan diri untuk membuka, membaca, dan mengacu pada datasheet, selain dari melakukan pengukuran karakteristik komponen dengan instrumen.
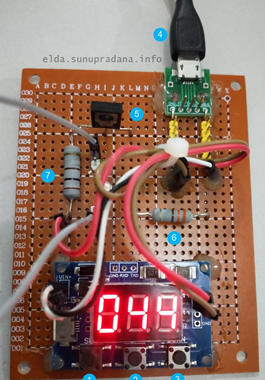
 Gambar 9. Papan percobaan penyakelaran transistor NPN
Gambar 9. Papan percobaan penyakelaran transistor NPN
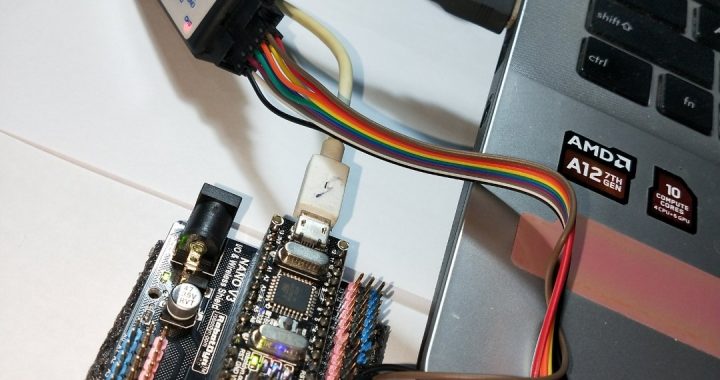
Pada Gambar 9, pin penanda satu sampai tiga adalah untuk tombol/switch pengaturan yang penggunaannya telah dijelaskan pada bagian sebelumnya di artikel ini. Pin 4 menunjukkan kabel USB yang memberikan daya melalui micro USB 2.0 port. Sumber daya bisa didapat misalnya dari charger telepon genggan yang telah diketahui memiliki pengaturan tegangan yang stabil. Pin 5 adalah kaki emitor dari BJT NPN BD139 yang terhubung dengan jalur GND dari port USB. Sekali lagi sebaiknya praktikan melihat dan mengacu pada datasheet. Pin penanda 6 menunjukkan resistor pada kaki kolektor dengan nilai nominal 330 Ω. Sedangkan pin penanda 7 adalah resistor pada kaki basis dengan nilai nominal 100 Ω. Agar dapat menghitung besar arus dengan benar, sebaiknya praktikan melakukan pengukuran kedua nilai resistor sebelum papan dihubungkan dengan catu daya.
Rating daya untuk kedua resistor sebenarnya tidaklah perlu sebesar yang saya pasang. Saya menggunakan resistor yang pada saat itu tersedia. Inilah contoh pentingnya memiliki sejumlah komponen untuk beberapa nilai yang sesuai, misalnya beberapa resistor dengan nilai resistansi yang berbeda yang paling umum sering dipergunakan. Kalau perlu memilih karena keterbatasan dana, pilihlah yang dayanya memadai agar bisa dipergunakan pada lebih dari satu skenario penggunaan.
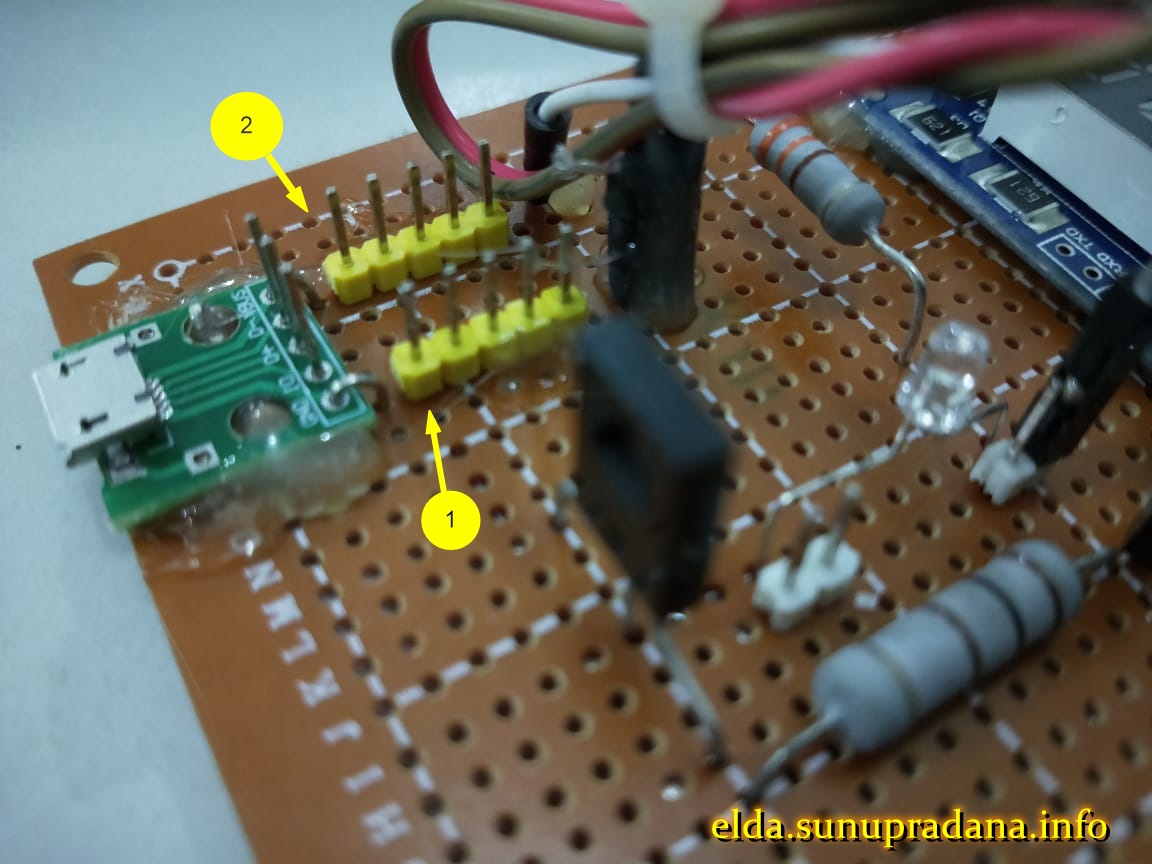 Gambar 10. Male pin header
Gambar 10. Male pin header
Pin penanda 1 pada Gambar 10 menunjukkan jalur GND dengan menggunakan male pin header, terhubung langsung dengan masukan lewat micro USB 2.0 port. Sedangkan pin 2 menunjukkan jalur tegangan +5V, juga dari USB port. Harap berhati-hati mengoperasikan peralatan/probe di sekitar jajaran pin header ini, jangan sampai terjadi hubung pendek.
Perhatikan juga bahwa male pin header berwarna putih di dekat BJT NPN dan berada di samping (terhubung paralel) dengan LED tidak dihubung singkat dengan kabel. Jika kedua pin header yang berseberangan itu terhubung, maka untuk eksperimen ini lepaslah salah kabel dari salah satu pin header.
Percobaan pertama yang dilakukan dengan papan BJT NPN ini adalah percobaan sebgaimana pada Gambar 7 di atas yang dikutip ulang di bawah ini:

Pada dasarnya rangkaian ini adalah rangkaian penyakelaran LED yang dilindungi oleh resistor dengan nilai nominal 330 Ω. Jika diukur dengan benar sebelum dihubungkan dengan rangkaian daya nilai resistor yang terukur bisa jadi tidak sama (persis) nilainya.
Cara percobaan ini memudahkan untuk melihat pengaruh penyakelaran pada suatu komponen. Kedipan LED pada frekuensi rendah memberi umpan balik langsung kepada praktikan mengenai kerja penyakelaran oleh BJT NPN yang sedang berlangsung, bahkan (misalnya) tanpa bantuan instrumen oscilloscope. Alasan ini adalah dasar dari pengaturan rangkaian percobaan pada papan BJT NPN.
Jika anda menggunakan oscilloscope untuk melakukan experimen, ada beberapa konfigurasi yang bisa dilakukan. Jika menggunakan dua probe untuk dua kanal (channel) maka kanal satu dipergunakan untuk melakukan pengukuran terhadap Vbe , hubungkan probe ke kaki basis dari NPN. Probe kanal dua dihubungkan dengan kaki kolektor NPN untuk dapat mengukur perubahan teganan Vce. Jika anda bisa menggunakan tiga kanal, mana probe untuk kanal ketiga dihubungkan dengan keki anode dari LED. Jika anda menggunakan empat kanal, maka anda bisa menghubungkan kanal terakhit itu ke kutub positif catu daya. Semua ground dari kanal dihubungkan ke kaki emitor NPN atau ke sisi negatif dari catu daya.
Jika hanya memilki akses ke oscilloscope dengan dua kanal, penempatan kanal kedua dapat dilakukan bergantian antara kaki kolektor, kaki anode LED, dan sumber positif dari catu daya. Dengan metode ini anda masih bisa mengukur nilai arus kolektor yang mengaliri resistor dan LED. Dengan cara yang sama pula, penempatan probe kanal satu juga dapat dilakukan begantian di antara kaki-kaki resistor basis untuk dapat mengukur nilai arus basis.
Dengan mengetahui nilai atus kolektor dan arus basis, anda bisa menghitung penguatan, βdc atau hFE pada saat itu. Lalu bandingkan dengan informasi pada datasheet dan teori baku tentang bagaimana operasi suatu BJT NPN.
[/su_panel] [su_panel border=”3px solid #005ce6″ radius=”10″]Eksperimen pertama menggunakan LED untuk bantuan visual (selain juga sebagai wawasan untuk biasa melakukan peyakelaran LED). Tetapi pada frekuensi yang lebih tinggi, kedipan LED itu tidak mudah terlihat. Dari sudut pandang ini, kegunaan keberadaan LED menjadi berkurang. Maka setelah bisa melihat dan membandingkan fenomena tampilan LED pada frekuensi yang lebih tinggi, akan lebih bermanfaat jika LED tidak lagi diaktifkan. Caranya adalah seperti pada Gambar 11, kaki anode pada LED dihubung singkat dengan kaki katode LED dengan bantuan kabel jumper.
 Gambar 11. Eksperimen kedua, tanpa LED
Gambar 11. Eksperimen kedua, tanpa LED
Lihat dan bandingkan anatara Gambar 10 di atas dengan Gambar 12 di bawah ini. Lihat pada Gambar 12 terdapat kabel berwarna abu-abu yang menghubungkan kedua male pin header sehingga kedua kaki LED (anode dan katode) terhubung singkat.
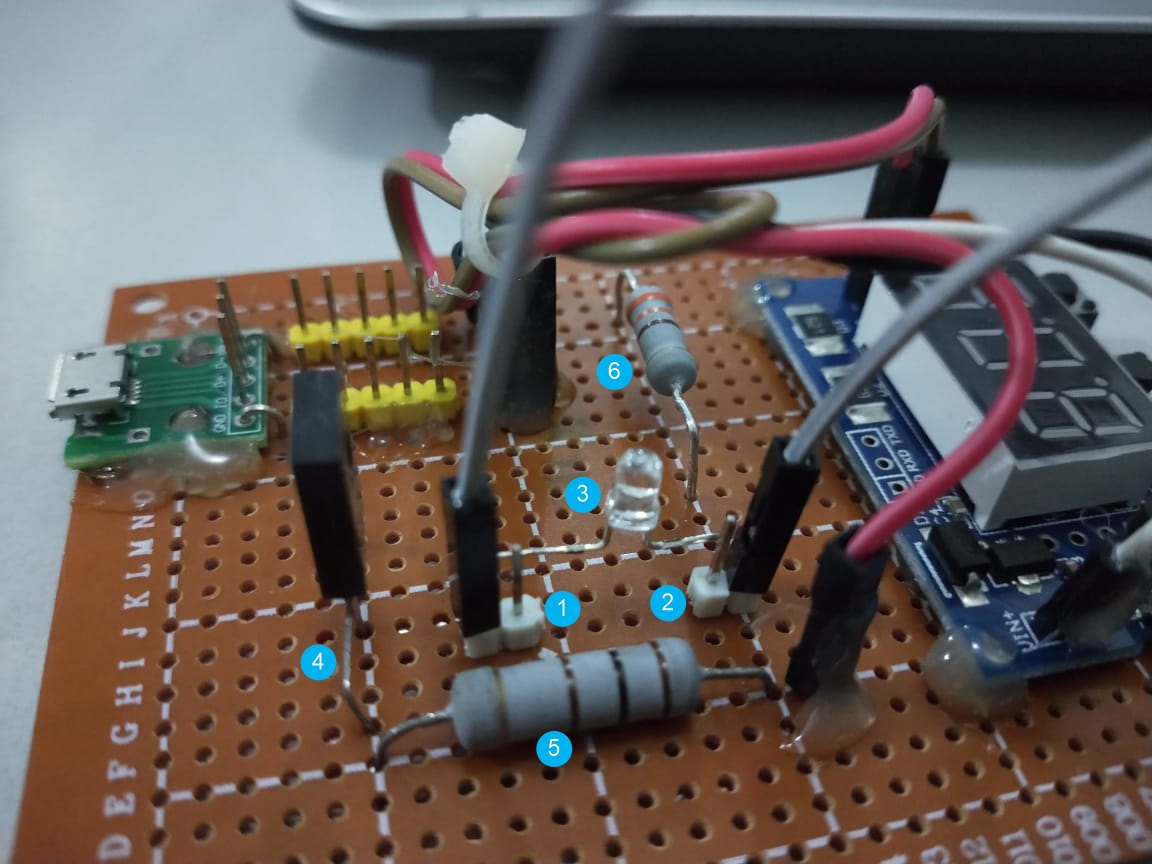 Gambar 12. Eksperimen kedua, tanpa LED
Gambar 12. Eksperimen kedua, tanpa LED
Pin penanda 1 adalah male pin header yang terhubung paralel dengan kaki katode LED, pin penanda 2 terhubung paralel dengan kaki anode LED. Pin 3 adalah LED daya rendah. Pin 4 adalah kaki basis NPN BJT BD 139 (tetaplah melihat dan mengacu pada datasheet). Pin 5 adalah penanda resistor basis dengan nilai sekitar 100 Ω.
Cara melakukan percobaan kali ini masih hampir sama dengan percobaan/eksperimen sebelumnya. Perbedaannya, sekarang kaki kolektor NPN (juga kaki katode LED) berada pada node yang sama dengan kaki anode LED. Ini dengan asumsi resistansi pada kabel jumper diabaikan.
[/su_panel] [su_panel border=”3px solid #bf80ff” radius=”10″] Gambar 13. Mahasiswa sedang memulai eksperimen/percobaan
Gambar 13. Mahasiswa sedang memulai eksperimen/percobaan
Pada saat saya menulis artikel ini, papan percobaan BJT NPN ini masih dipakai sebagai modul percobaan pengganti pada praktikum. Jika peralatan pengganti yang lebih baik yang sedang dibuat mahasiswa sudah selesai dengan baik, maka peralatan papan BJT NPN BD 139 ini direncakanan akan digeser untuk dipakai di mata kuliah teori Elektronika Daya 2. Dengan metode pembelajaran problem based learning, mahasiswa harus merekonstruksi sendiri pengetahuannya tentang penyakelaran BJT NPN dengan PWM. Dengan information literacy yang sudah diajarkan di semester 5 seharusnya mahasiswa yang sungguh-sungguh dalam belajar tidak akan menemui kesulitan untuk dapat memahami. Di Internet telah banyak sumber belajar audio-visual yang bisa dipelajari dan diperbandingkan satu-sama-lain. Papan ini akan membantu memudahkan mahasiswa untuk belajar secara mandiri di ruang laboratorium.
Pembiasaan belajar mandiri ini tidaklah unik. Telah berlaku lama di negara-negara yang maju dalam STEM (science, technology, engineering. and mathematics). Oleh karena itu pula mereka yang lebih siap untuk melakukan transisi ke Revolusi Industri 4.0. Diperkirakan di era ini bidang lapangan pekerjaan untuk tingkat lulusan perguruan tinggi akan mengalami pergeseran dan gangguan. Banyak pekerjaan baru yang muncul, umumnya menuntut kemampuan berpikir, kognitif, yang lebih baik. Pekerjaan rutin untuk level ini akan mulai berkurang. Kecuali lulusan perguruan tinggi (dengan sejumlah besar pengorbanan sumber daya seperti waktu dan biaya) hendak direlakan untuk fokus pada manual labour di level di bawahnya. Pekerjaan fisik berat memang masih akan banyak diperlukan mengingat biaya modal dan operasi robot masih akan lebih mahal dibandingkan dengan tenaga kerja manusia.
Selamat belajar !
[/su_panel] [su_panel border=”3px solid #990066″ radius=”10″] [/su_panel]
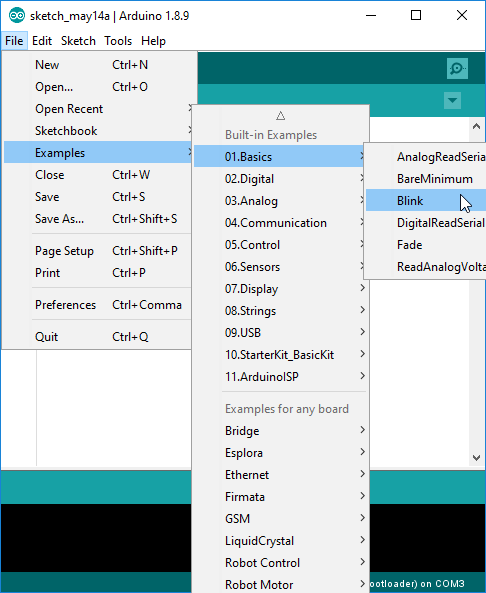 Gambar 1. Mencari kode contoh Blink di Arduino IDE
Gambar 1. Mencari kode contoh Blink di Arduino IDE

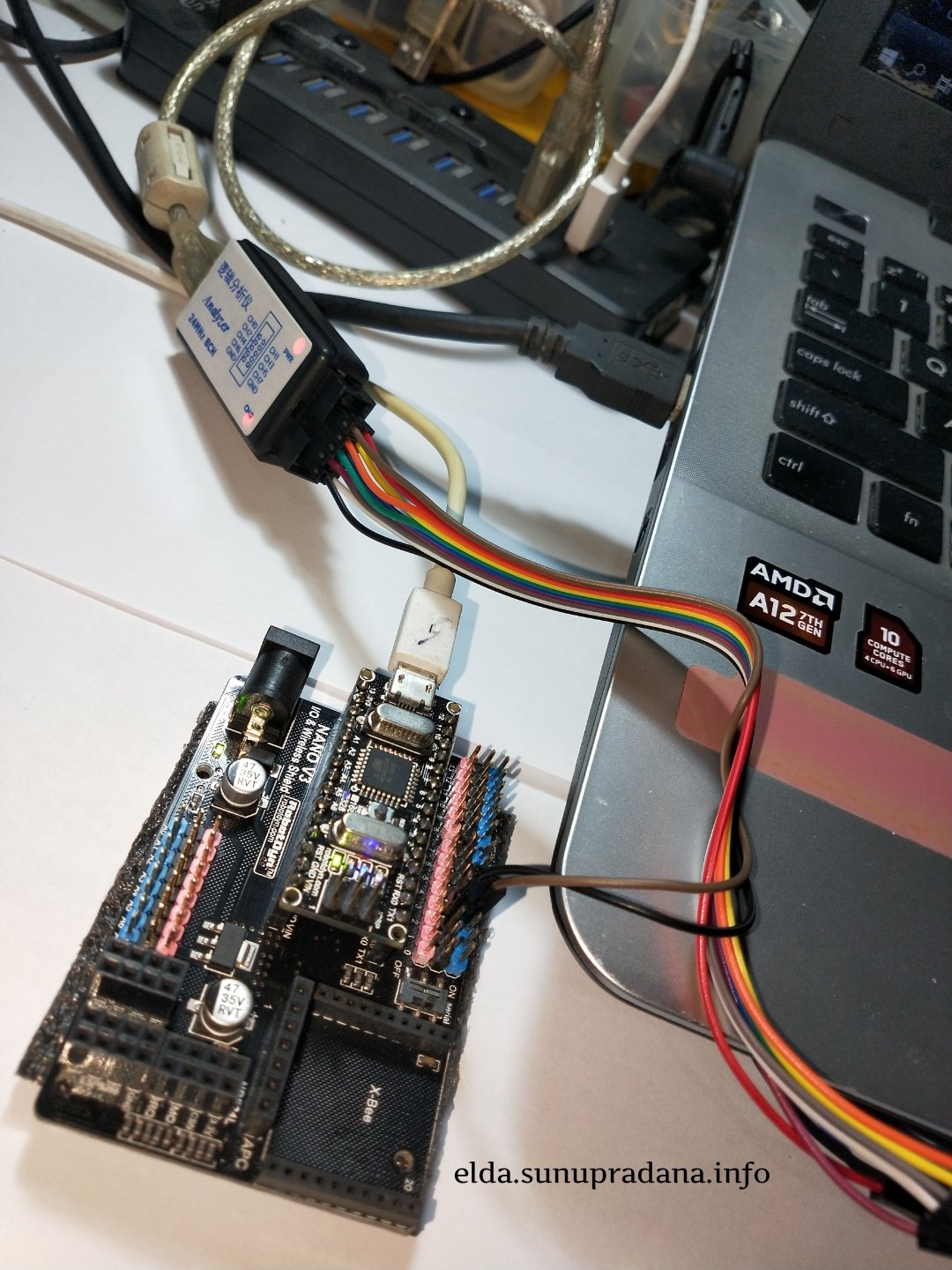

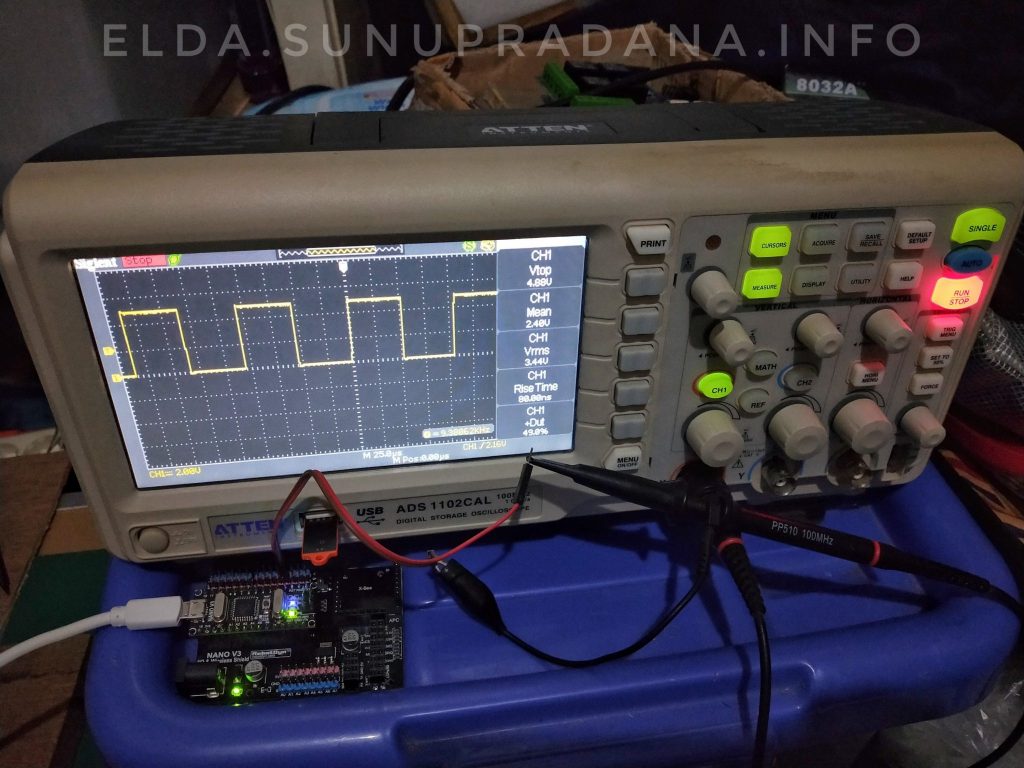 Gambar 8. Setup pengujian dengan oscillocope 100 MHz, 1 GSa/s
Gambar 8. Setup pengujian dengan oscillocope 100 MHz, 1 GSa/s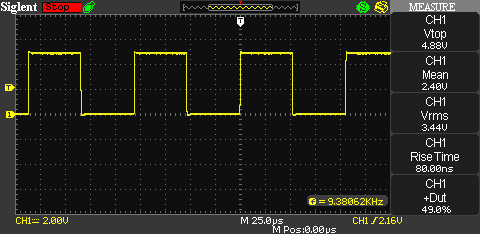
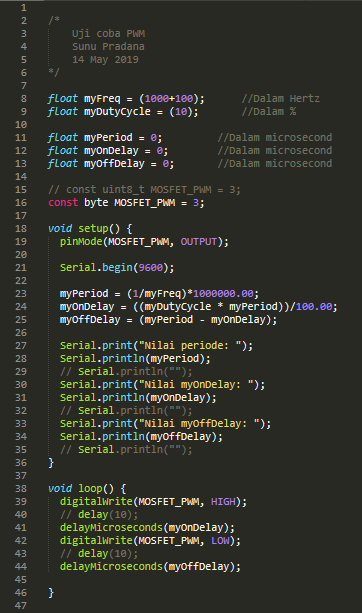 Gambar 12. Kode program pengembangan, variasi kelima
Gambar 12. Kode program pengembangan, variasi kelima