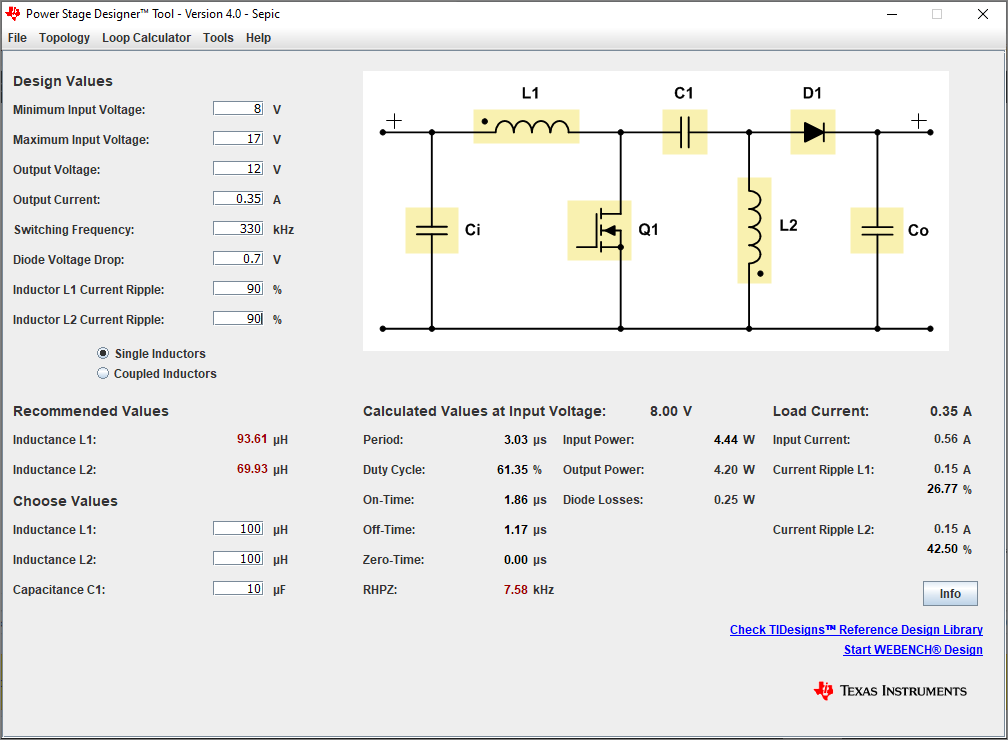
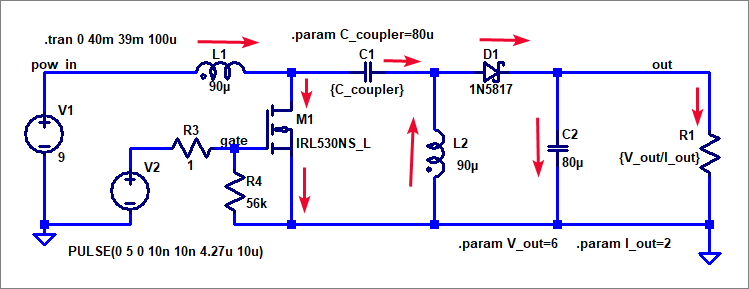
Mari memulai dari contoh bagaimana suatu open-loop SEPIC circuit hendak dirancang. Polanya sama dengan yang ditampilkan pada artikel sebelumnya, yaitu didahului dengan perancangan di Power Stage Designer Tool (versi 4.0).
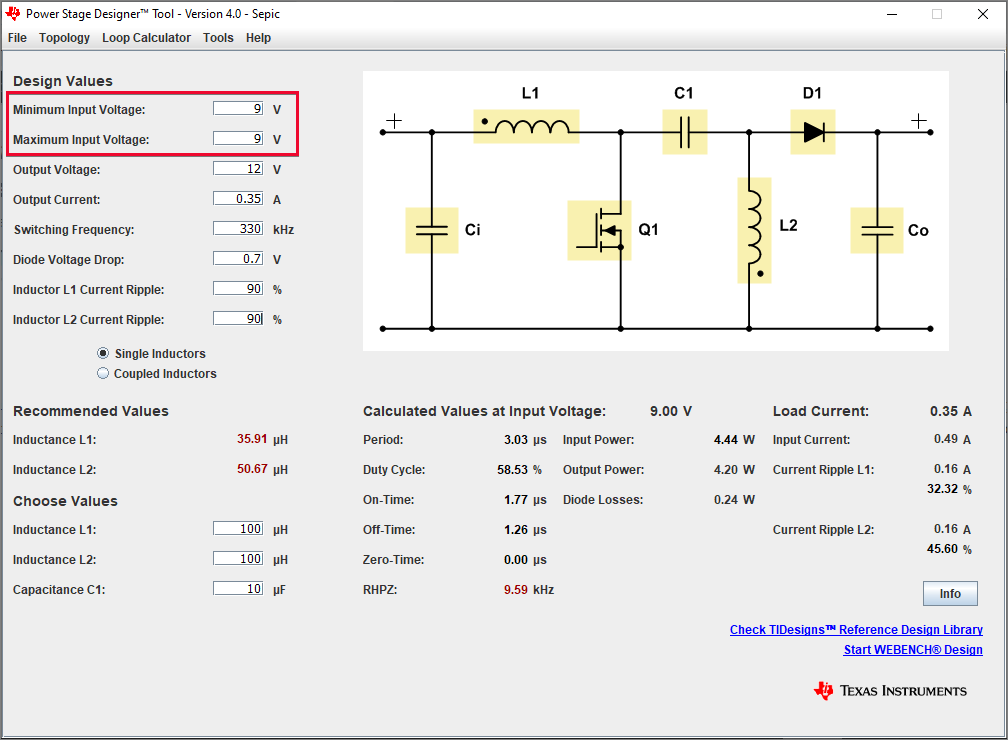
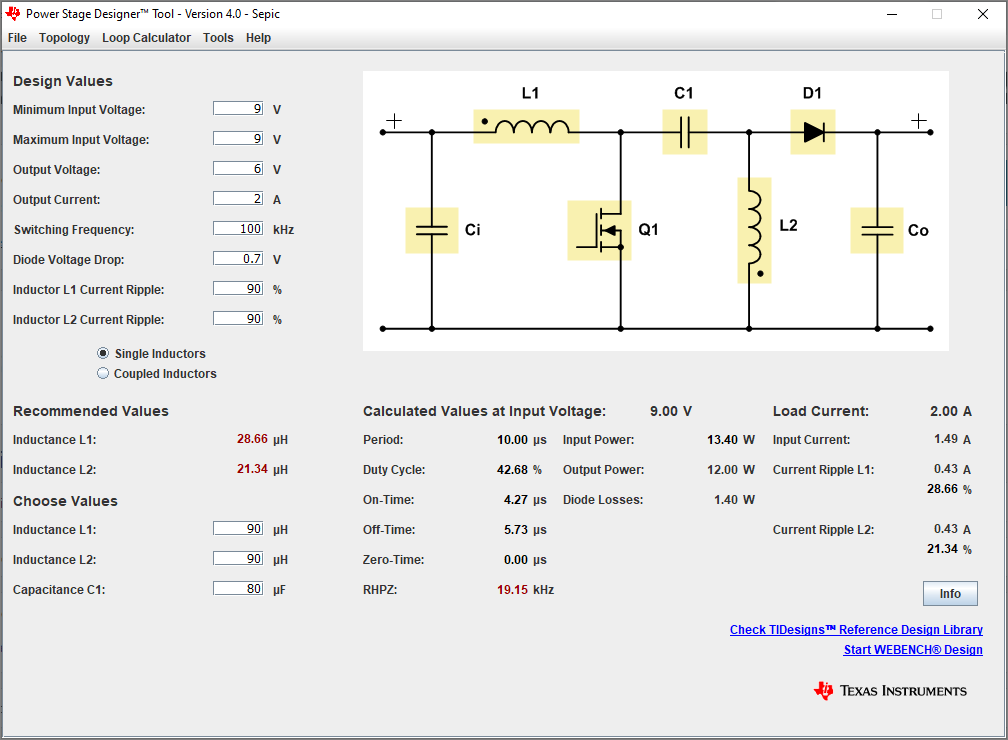
Tujuan rancangan awal yang diinginkan adalah untuk mendapatkan sebuah rangkaian konverter open-loop SEPIC. Rangkaian dasar ini nanti dapat dilanjutkan menjadi sebuah sistem closed-loop SEPIC. Sistem DC-DC converter SEPIC yang diinginkan adalah yang mampu mengalirkan sejumlah 0.35 A ke beban, dengan level tegangan terminal keluaran konverter sebesar 12 V. Input rangkaian berupa tegangan DC antara 8 V sampai 17 V. Operasi penyakelaran sebesar 330 kHz. Batas riak arus (current ripple) pada induktor yang diinginkan maksimum sebesar 90%. Rancangan awal dengan PSD dapat dilihat di Gambar 1 berikut ini.
[ Semua gambar di bawah ini dapat dilihat versi tampilan yang lebih besar dengan cara melakukan klik-kanan di gambar lalu memilih “Open image in new tab” pada browser. ]
 Gambar 1. Rancangan awal rangkaian dengan PSD
Gambar 1. Rancangan awal rangkaian dengan PSD
 Gambar 2. Contoh pengaturan tegangan input dengan slider.
Gambar 2. Contoh pengaturan tegangan input dengan slider.
Di Gambar 2 bisa dilihat bahwa pengguna/perancang bisa melakukan simulasi nilai input menjadi sebesar 8.99 V dari batas rentang antara 8 V sampai 17 V. Namun cara yang lebih mudah dan tepat adalah untuk sementara mengganti semua nilai tegangan masukan menjadi sebesar 9 V seperti pada Gambar 3.
 Gambar 3. Semua nilai input diganti menjadi 9 V.
Gambar 3. Semua nilai input diganti menjadi 9 V.
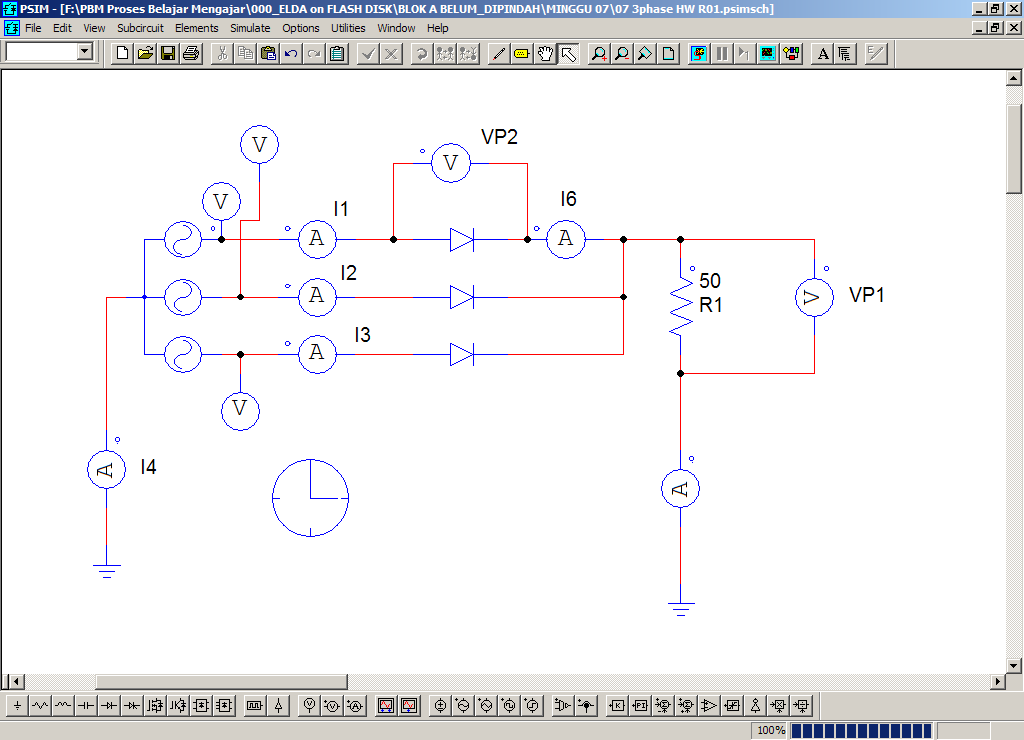
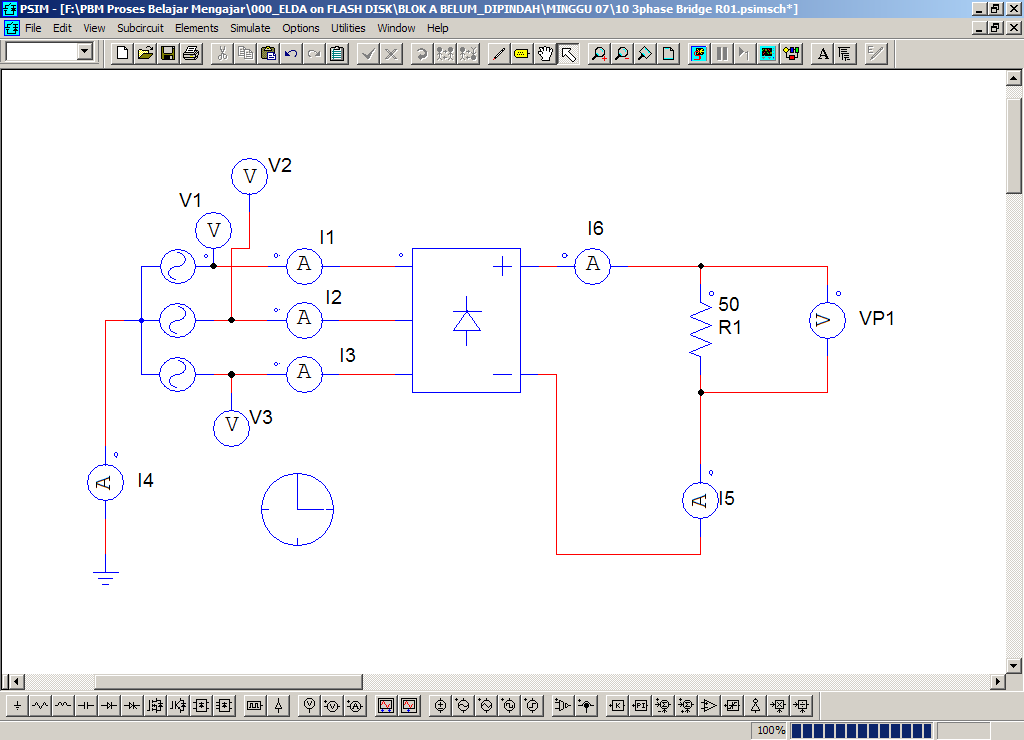
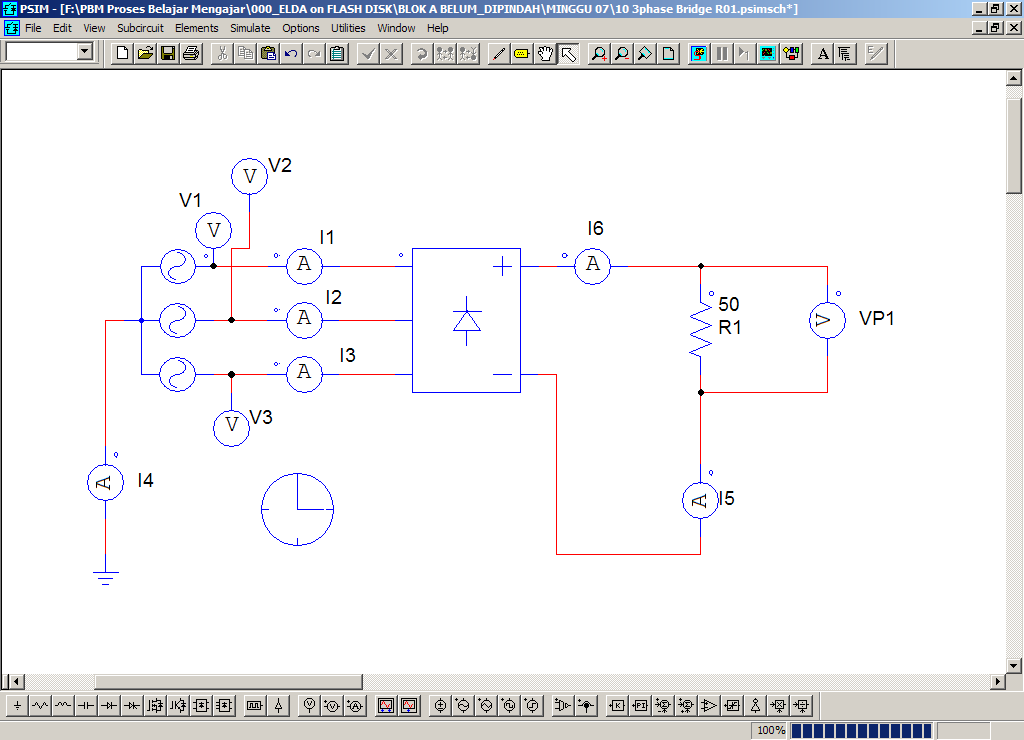
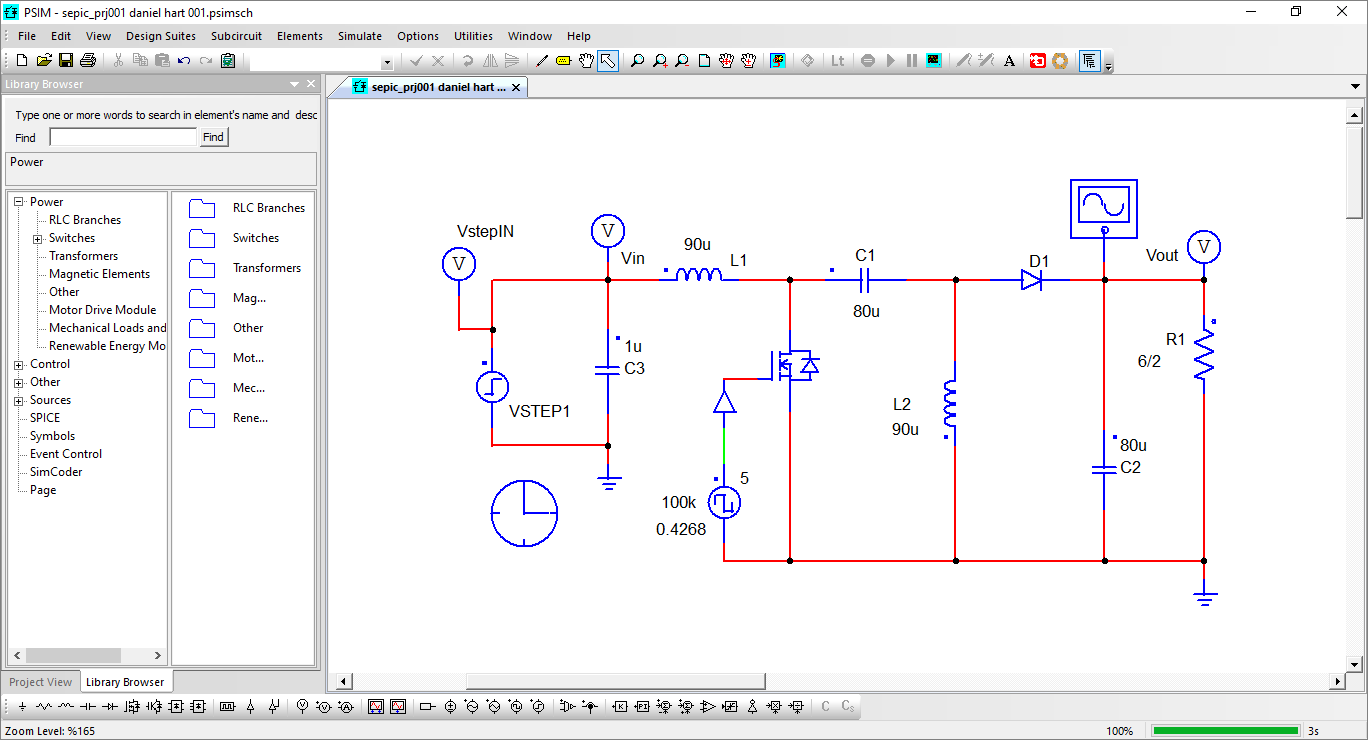
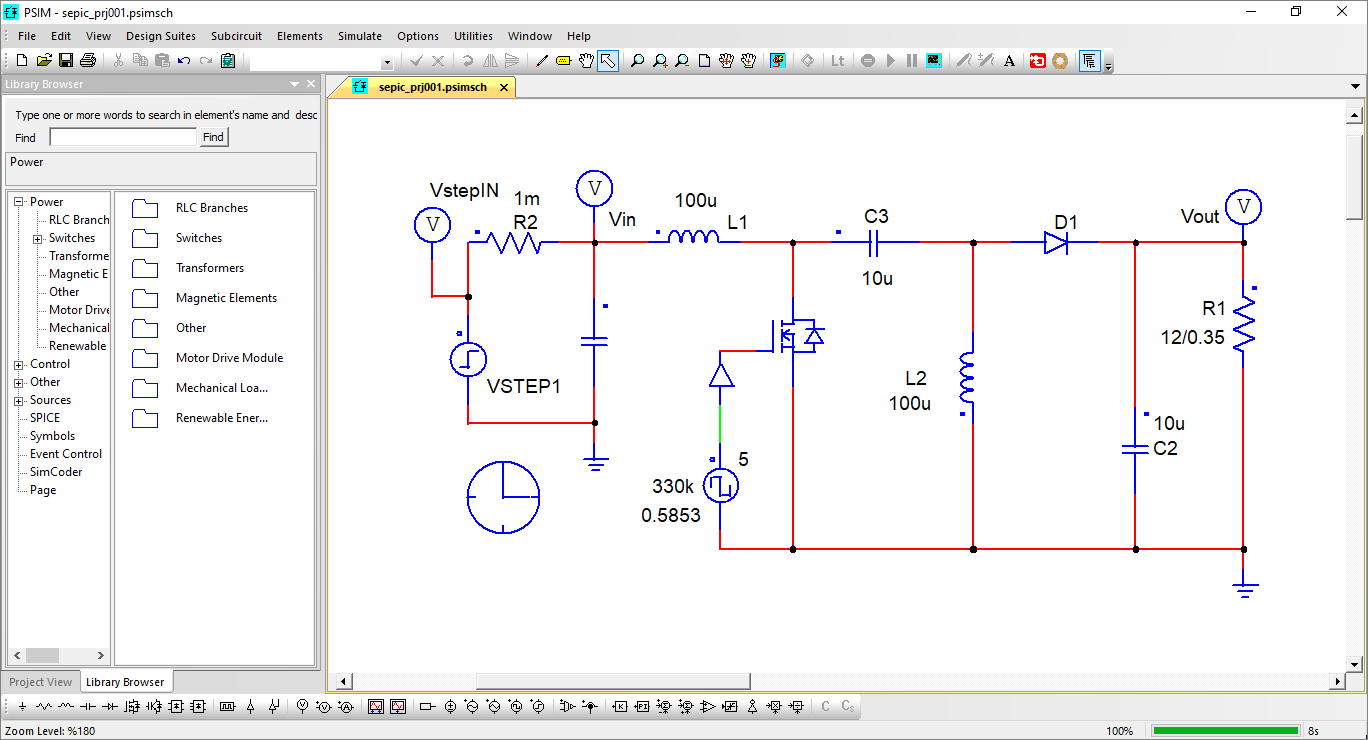 Gambar 4. Simulasi rancangan di PSIM
Gambar 4. Simulasi rancangan di PSIM
Hasil rancangan awal di PSD kemudian dilanjutkan dengan simulasi di PSIM student version seperti di Gambar 4. Ini adalah salah satu bentuk alternatif pemicuan MOSFET di PSIM. Pemicuan MOSFET ideal ini dapat menggunakan ‘square-wave voltage source’, dengan detail seperti di Gambar 5.
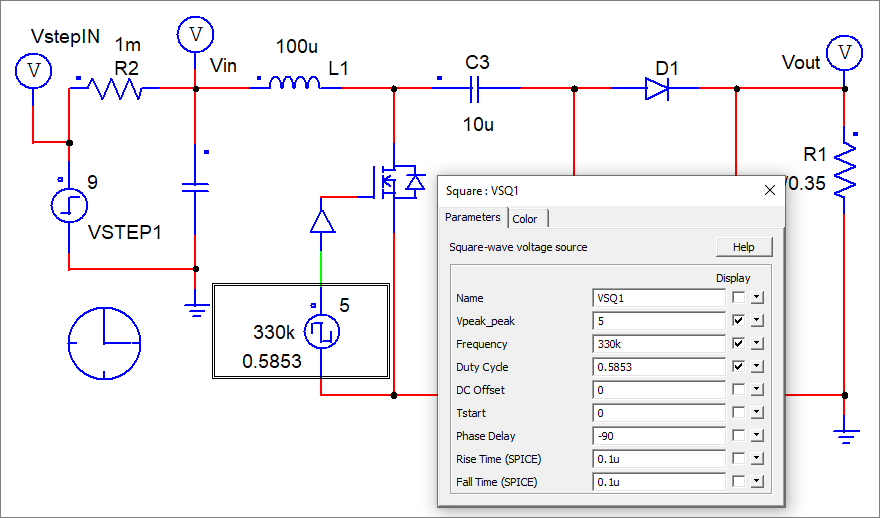 Gambar 5. Pengaturan parameter untuk square-wave voltage source.
Gambar 5. Pengaturan parameter untuk square-wave voltage source.
Nilai duty cycle sebesar 58.53% yang dengan mudah diperoleh menggunakan PSD, dimasukkan sebagai 0.5853 di PSIM. Demikian juga nilai frekuensi 330 kHz dimasukkan sebagai 330k.
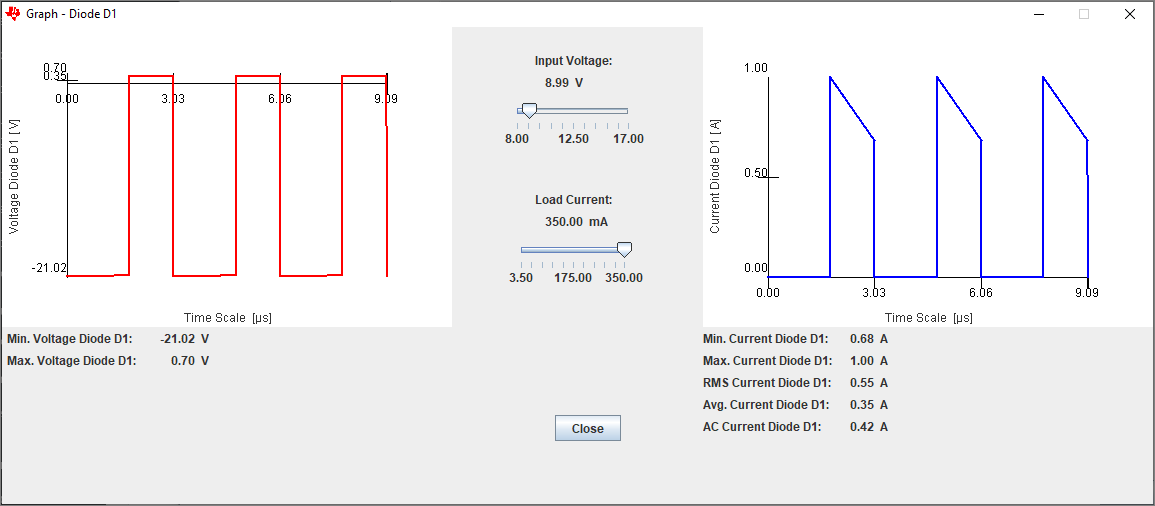
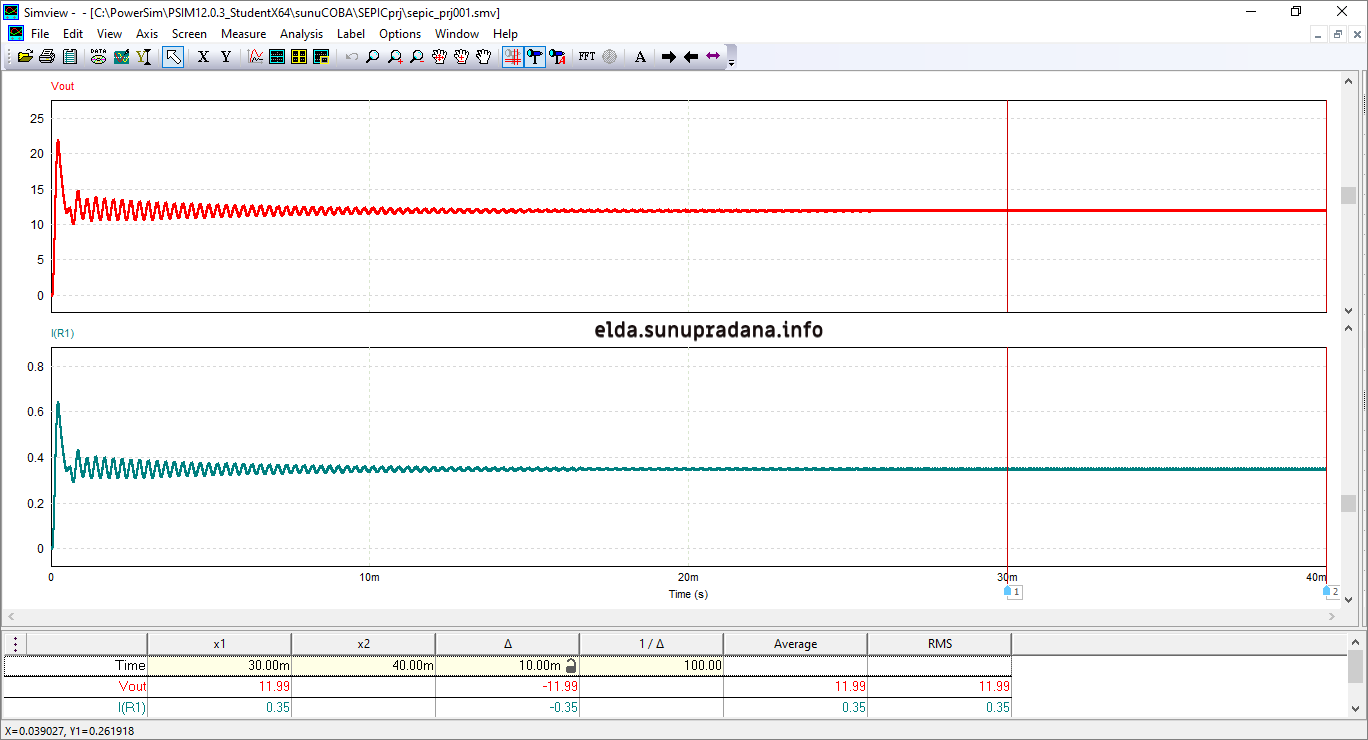 Gambar 6. Nilai average dan RMS hasil simulasi PSIM (Simview).
Gambar 6. Nilai average dan RMS hasil simulasi PSIM (Simview).
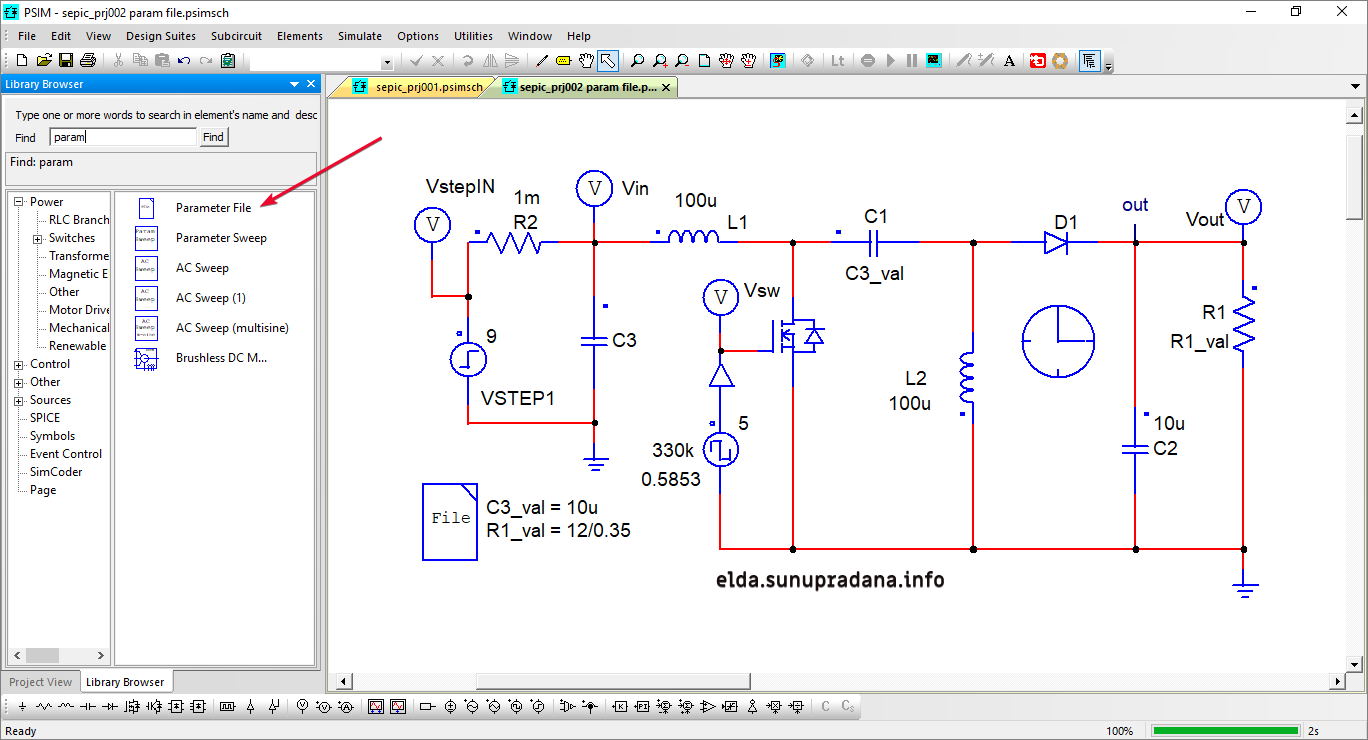 Gambar 7. Penggunaan Parameter File di PSIM.
Gambar 7. Penggunaan Parameter File di PSIM.
Simulasi di Gambar 7 pada dasarnya serupa dengan simulasi sebelumnya. Perbedaan utamanya adalah penggunaan fasilitas Parameter File. Seperti terlihat dengan penggunaan fasilitas ini parameter komponen dapat dikumpulkan dengan rapi di dalamnya. Bahkan jika dikehendaki isi file dapat juga ditampilkan di schematic.
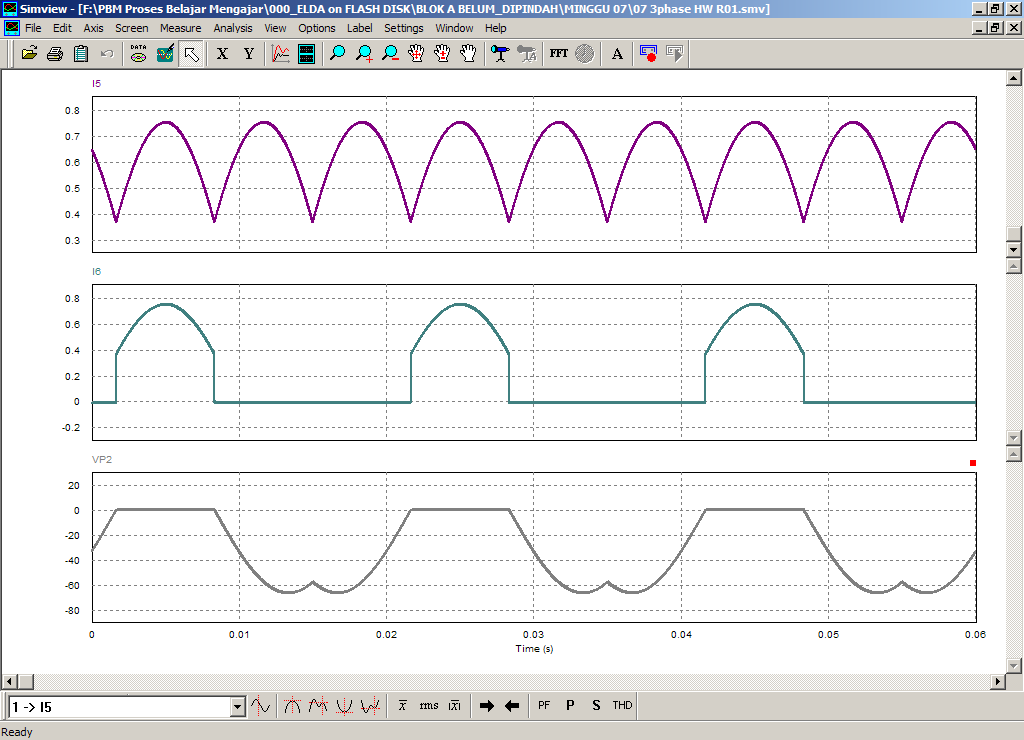
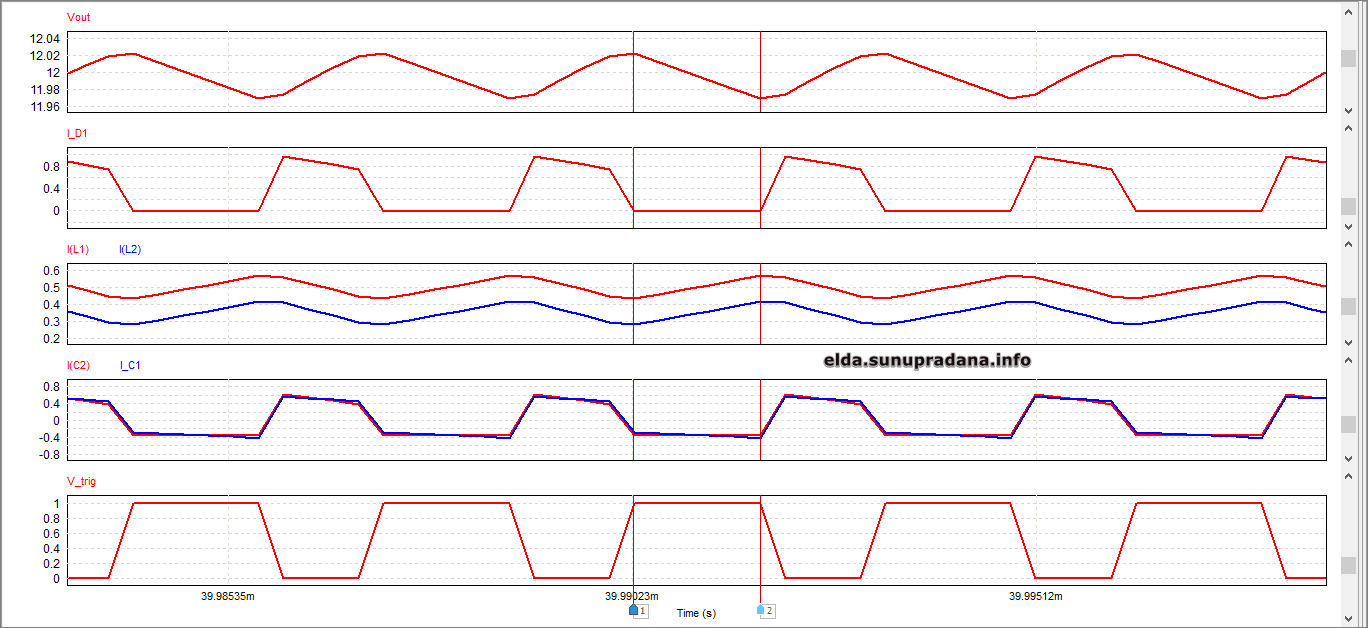
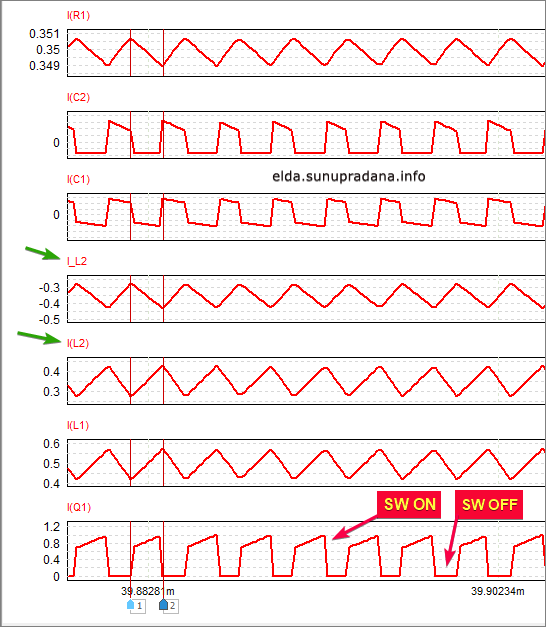
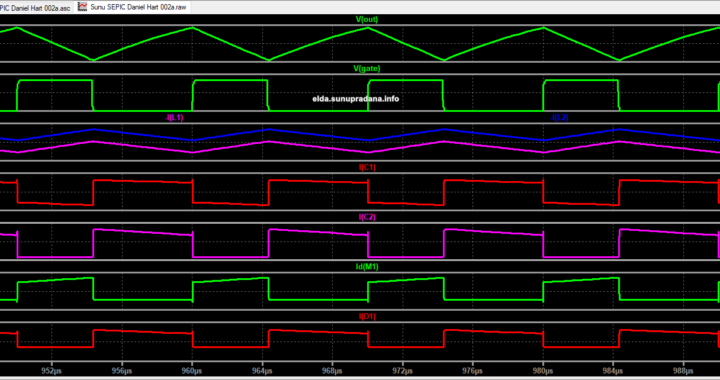
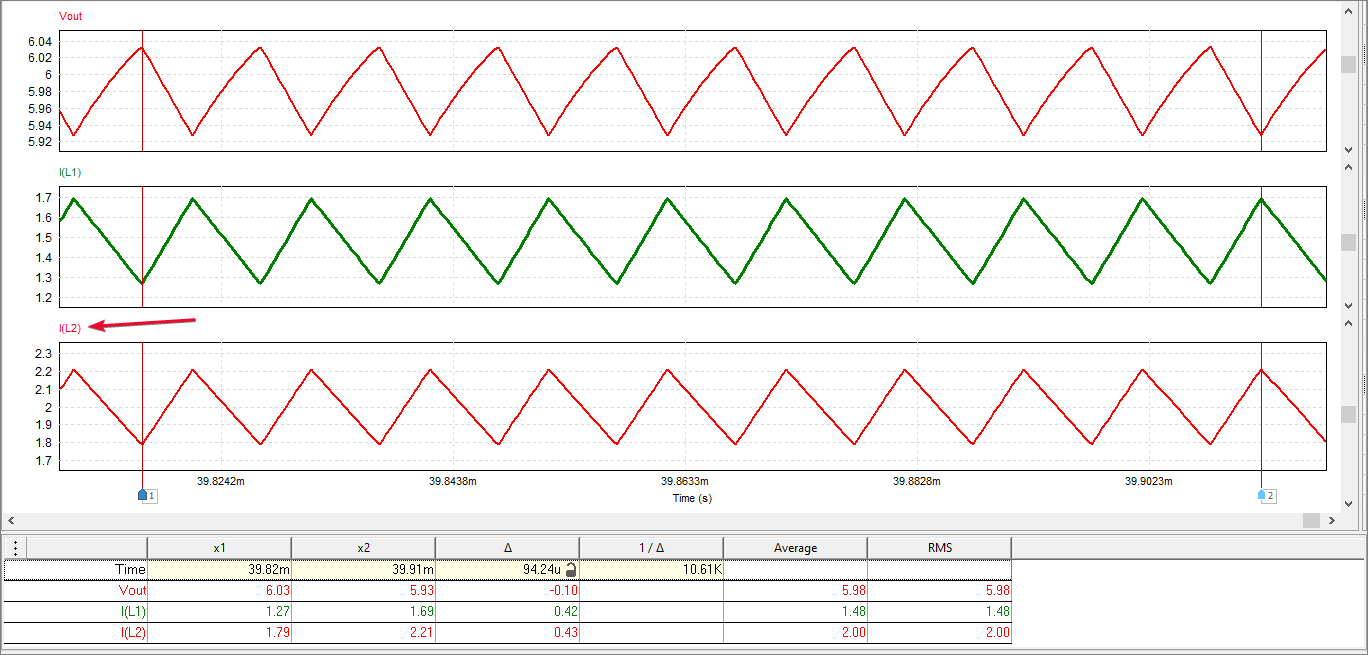
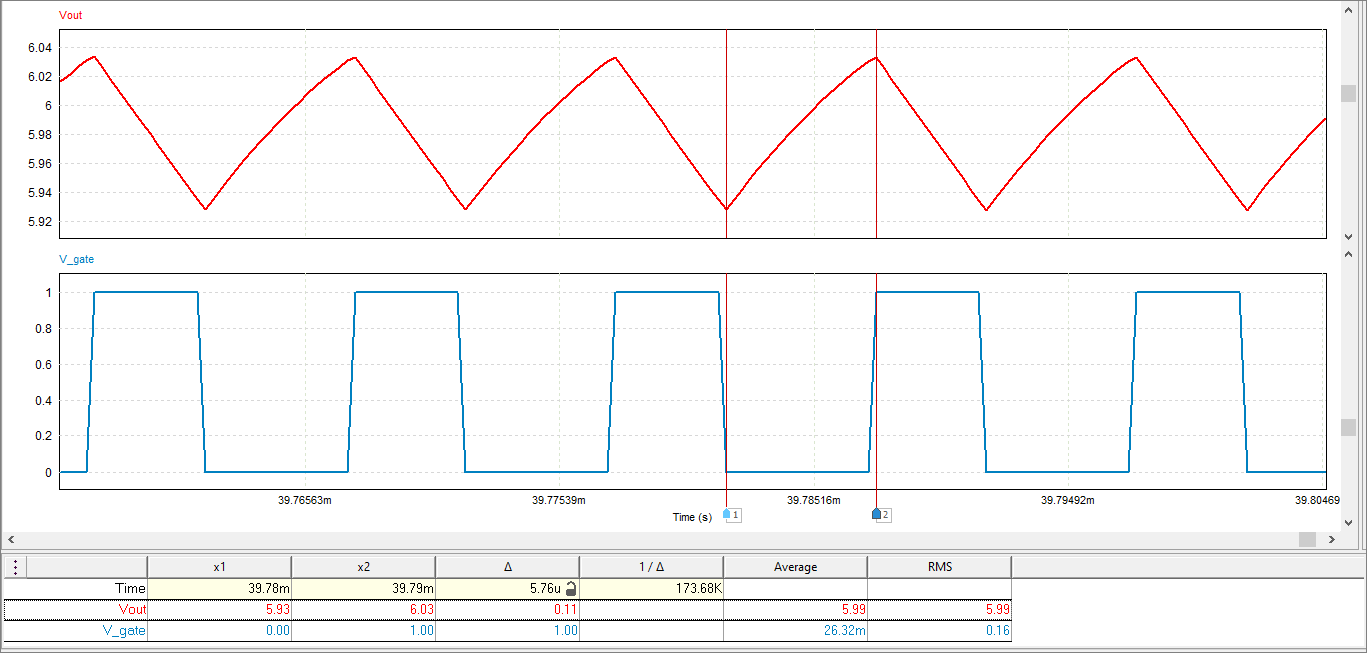
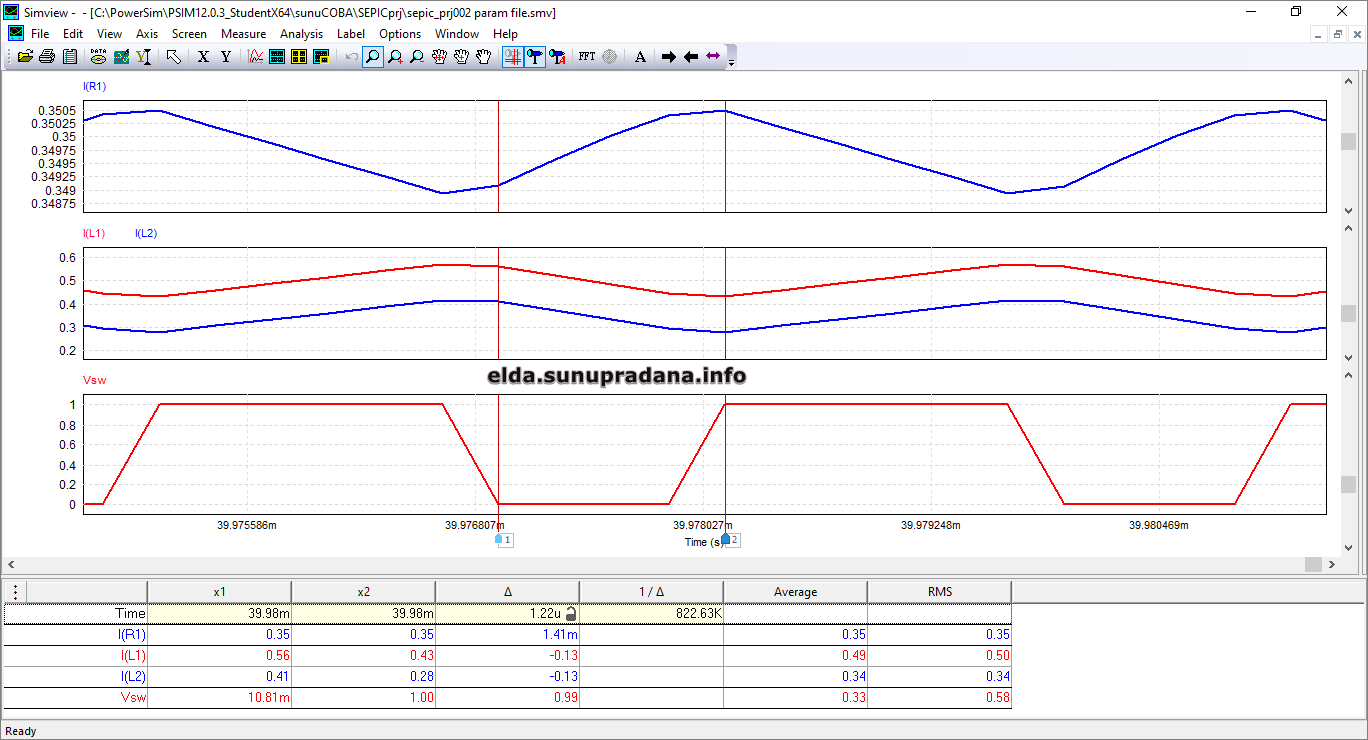 Gambar 8. Hasil simulasi, zoom-in.
Gambar 8. Hasil simulasi, zoom-in.
Di Gambar 8 dapat dilihat bagimana pengaruh penyakelaran MOSFET pada arus di induktor L1, L2, dan arus di R1. Dari gambar ini bisa diperhatikan bagaimana kondisi pada saat MOSFET on dan juga bagaimana pada saat MOSFET off.
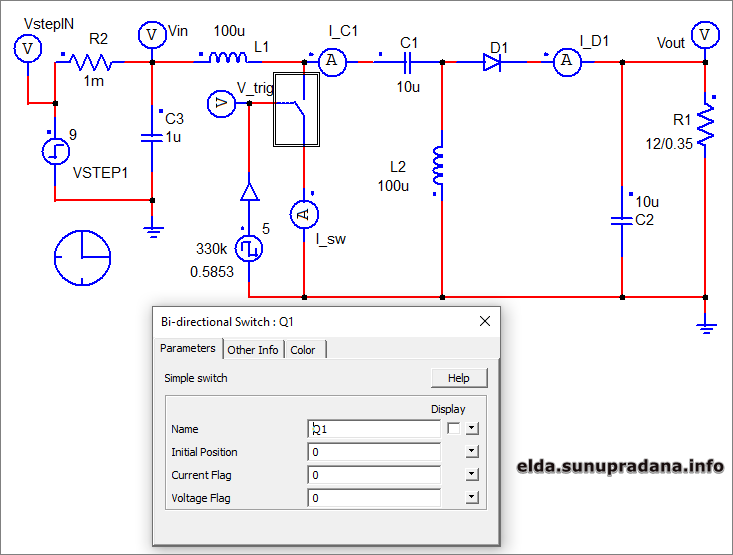 Gambar 9. Penggunaan bi-directional switch.
Gambar 9. Penggunaan bi-directional switch.
Jika sebelumnya on-off switch controller dipergunakan untuk membantu pemicuan MOSFET, maka di Gambar 9 bisa dilihat bahwa sakelar elektronik berupa MOSFET diganti dengan bi-directional switch. Sama seperti komponen lain dalam simulasi, Flag dapat diberi nilai 1 agar arus/tegangan di komponen tersebut dapat disimpan. Tetapi untuk simulasi ini akan dicontohkan penggunaan voltage probe dan current probe.
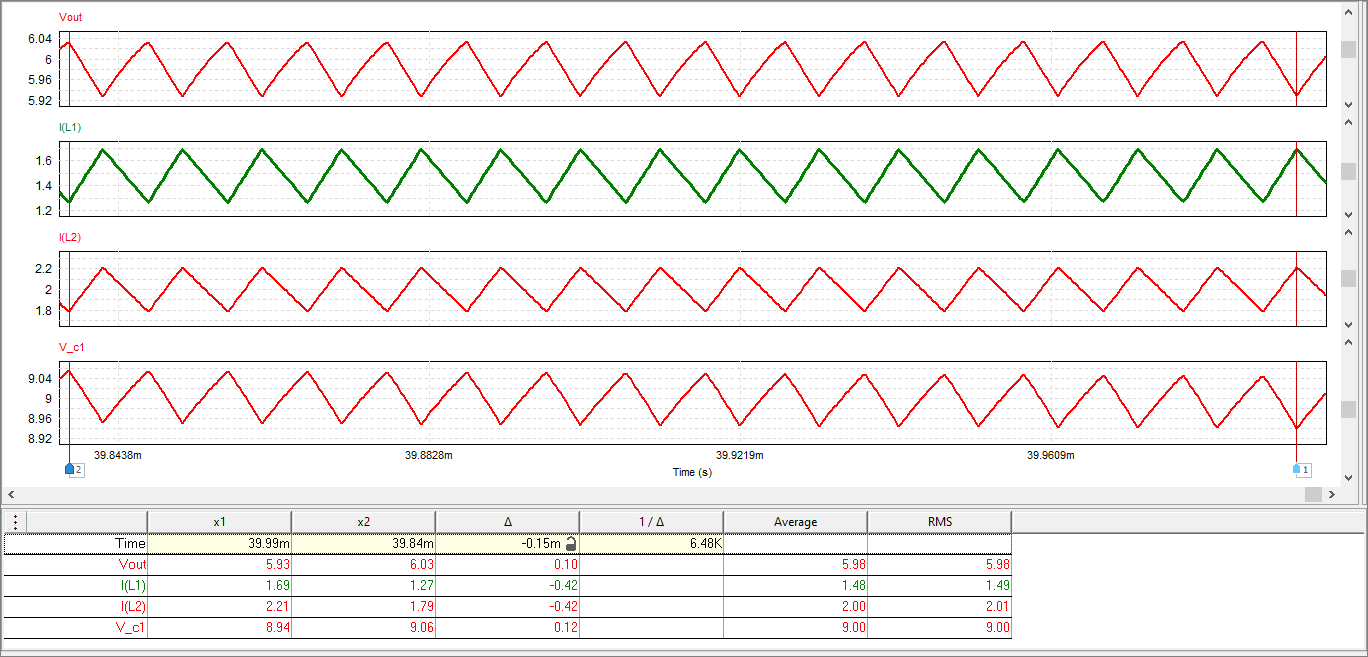
 Gambar 10. Hasil simulasi dengan bi-directional switch.
Gambar 10. Hasil simulasi dengan bi-directional switch.
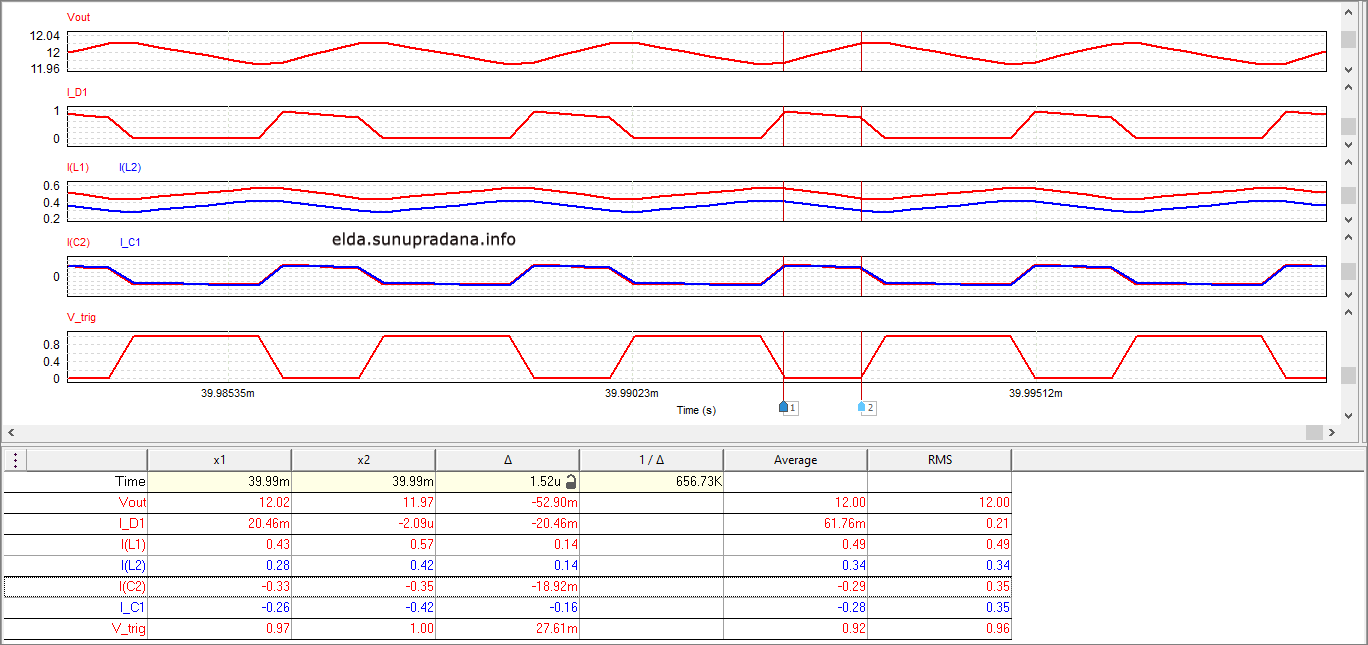 Gambar 11. Hasil simulasi (average & RMS) dengan bi-directional switch.
Gambar 11. Hasil simulasi (average & RMS) dengan bi-directional switch.
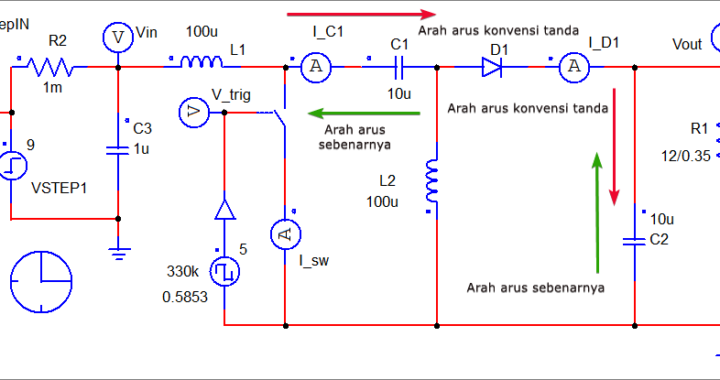
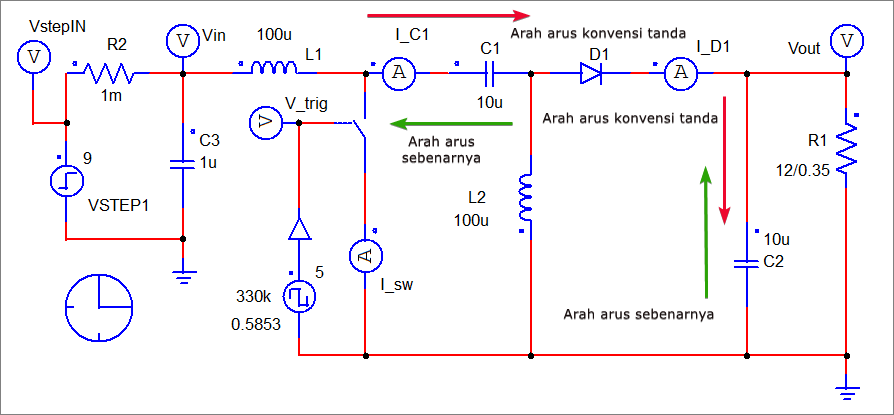
 Gambar 12. Arah aliran arus melewati kapasitor saat kondisi sakelar on & off.
Gambar 12. Arah aliran arus melewati kapasitor saat kondisi sakelar on & off.
Gambar 12 merupakan penjelas dari Gambar 10 dan Gambar 11 khusus untuk menunjukkan perubahan arah aliran arus di kapasitor. Bisa dilihat di Gambar 10 maupun Gambar 11 bahwa arah arus yang melintasi kedua induktor adalah tetap. Begitu pun dengan arah arus di beban. Untuk arah arus di switch dan diode juga tetap tetapi ada saat mengalami discontinuity (arus dapat bernilai 0 A), lihat Gambar 13 berikut ini.
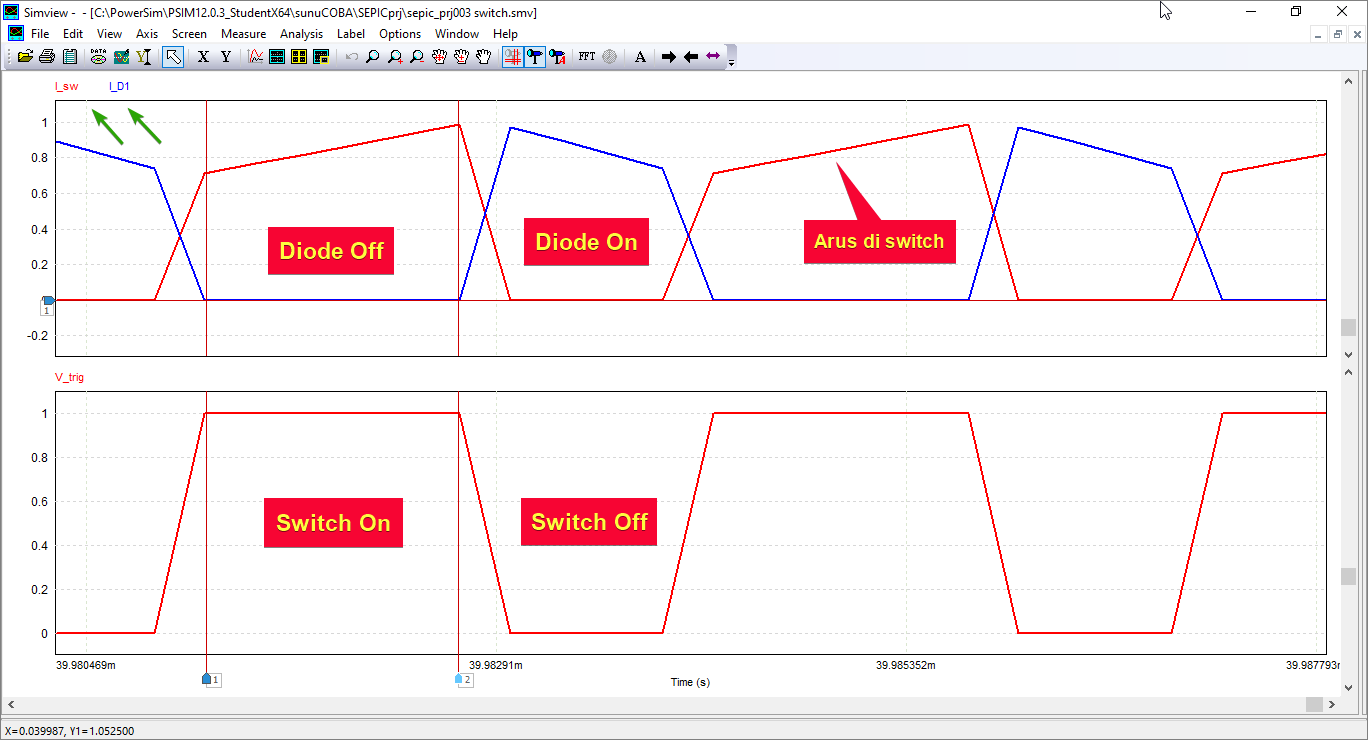 Gambar 13. Nilai aliran arus melewati switch dan diode saat kondisi switch on & off.
Gambar 13. Nilai aliran arus melewati switch dan diode saat kondisi switch on & off.
Penandaan negatif mauppun positif (biasanya tidak ditulis) hanya menunjukkan arah arus sebenarnya, relatif terhadap arah arus konvensi (yang ditetapkan dari awal sebagai rujukan). Untuk mengingat kembali tentang passive sign convention, dapat melihat di halaman Wikipedia ini. Perubahan arah arus sebenarnya di kedua kapasitor yang ditunjukkan dengan kurva di Gambar 12 dapat dilihat dengan lebih jelas di Gambar 14 berikut ini. Ingat tentang kondisi posisi switch on saat arah arus ini terjadi (tanda panah hijau), sehingga nilai arus diberi tanda negatif. Jika sakelar/switch dalam posisi off maka arah arus justru akan sama dengan arah tanda panah konvensi arus yang berwana merah, maka nilai arusnya positif. Perubahan polaritas ini terus menerus terjadi selama penyakelaran terjadi.
 Gambar 14. Arah arus melewati kedua kapasitor saat kondisi switch on.
Gambar 14. Arah arus melewati kedua kapasitor saat kondisi switch on.
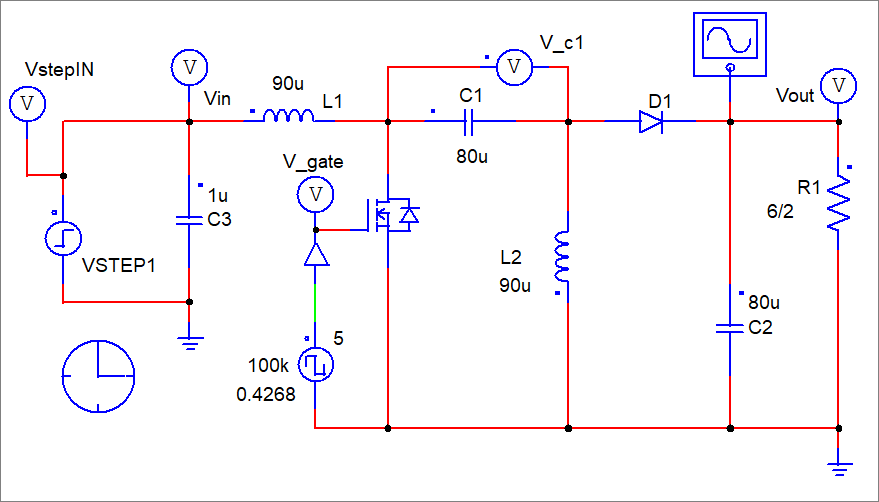
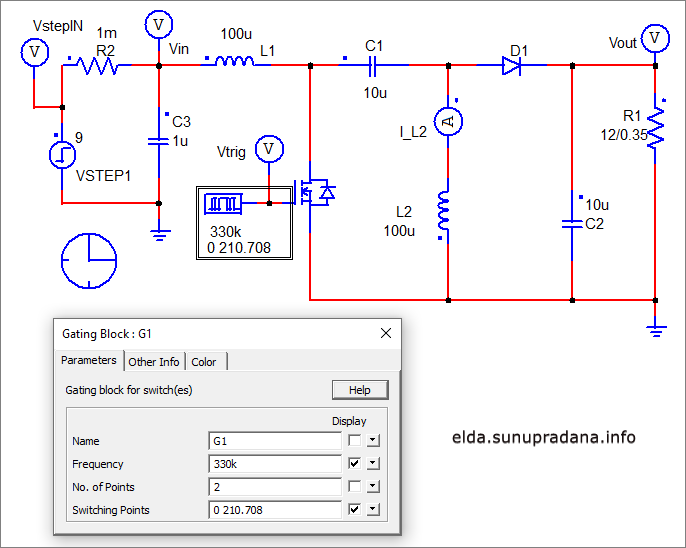 Gambar 15. Simulasi SEPIC di PSIM menggunakan pemicuan Gating Block.
Gambar 15. Simulasi SEPIC di PSIM menggunakan pemicuan Gating Block.
Gambar 15 menunjukkan bahwa pemicuan juga dapat dilakukan dengan menggunakan Gating Block. Perbedaannya adalah pada penulisan pengaturan waktu pemicuan. Jika input frekuensi sama dengan nol maka switching points akan bermakna seconds, sedangkan jika nilai frekuensi tidak nol seperti contoh maka switching points akan dihitung dalam degree. Duty cycle sebesar 58.53% sebanding nilainya dengan 210.708 derajat.
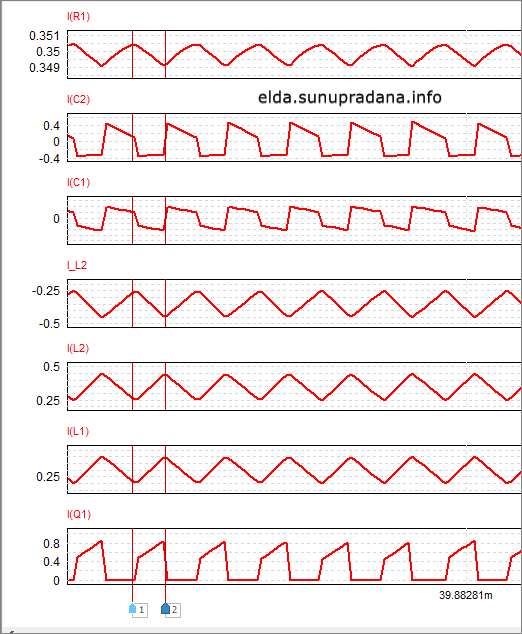
 Gambar 16. Arah arus melewati kedua kapasitor saat kondisi switch on, dari 9 V ke 12 V .
Gambar 16. Arah arus melewati kedua kapasitor saat kondisi switch on, dari 9 V ke 12 V .
Gambar 16 merupakan hasil simulasi dari sistem SEPIC di Gambar 15, saat tegangan masukan sebesar 9 V dinaikkan menjadi 12 V di keluaran yang mengalirkan arus sebesar 0.35 A di beban. Arah arus (polaritas) di kapasitor sama dengan yang diperlihatkan di Gambar 12.
Di Gambar 16 juga diperlihatkan bahwa terdapat dua pengukuran arus yang melewati induktor L2. Sekalipun nilai (absolut) sama tetapi polaritasnya berbeda. Untuk memahami fenomena ini, lihat kembali Gambar 15. Posisi polaritas alat ukur I_L2 yang diwakili oleh tanda titik (dot) berbeda dengan polaritas konvensi penanda arus komponen induktor L2. Karena itu pada saat switch on, di L2 arah arus sebenarnya adalah dari ground ke titik node pertemuan antara C1, D1, dan I_L2. Karena arah arus sebenarnya bersesuaian dengan konvensi arus yang ditetapkan (melalui penempatan posisi tanda polaritas komponen), maka nilai arus adalah positif. Tetapi perlu diingat bahwa komponen fisik yang sesungguhnya dari induktor dan resistor tidak memiliki polaritas sebagai mana seperti kapasitor elektrolit (elco). Pada induktor tanda dot dipergunakan juga untuk menunjukkan arah masuk putaran kawat di inti (core). Arah arus sebenarnya pada saat sakelar hidup ini berlawanan dengan tanda polaritas di alat ukur I_L2, karena itu sekalipun nilainya sama dengan pembacaan arus L2 tetapi bertanda negatif.
Di Gambar 17 di bawah ini anda bisa melihat hasil simulasi rangkaian yang sama di Gambar 15. Perbedaannya adalah bahwa rangkaian kali ini dipergunakan untuk menurunkan level tegangan input yang sebesar 15 V menjadi tegangan keluaran sebesar 12 V yang mengalirkan arus yang besarnya sama yaitu 0.35 A di beban. Untuk mencapai ini maka nilai sudut pemicuan diubah dari yang semula 210.708 menjadi 165.06. Bisa dilihat bahwa pola sinyal di Gambar 17 sama dengan pola sinyal di Gambar 16. Baik untuk step-up maupun step-down, cara kerja komponen akan sama walaupun nilai arus dan tegangannya berbeda.
 Gambar 17. Arah arus melewati kedua kapasitor saat kondisi switch on, dari 15 V ke 12 V .
Gambar 17. Arah arus melewati kedua kapasitor saat kondisi switch on, dari 15 V ke 12 V .
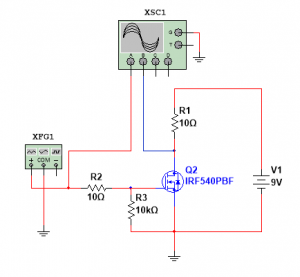
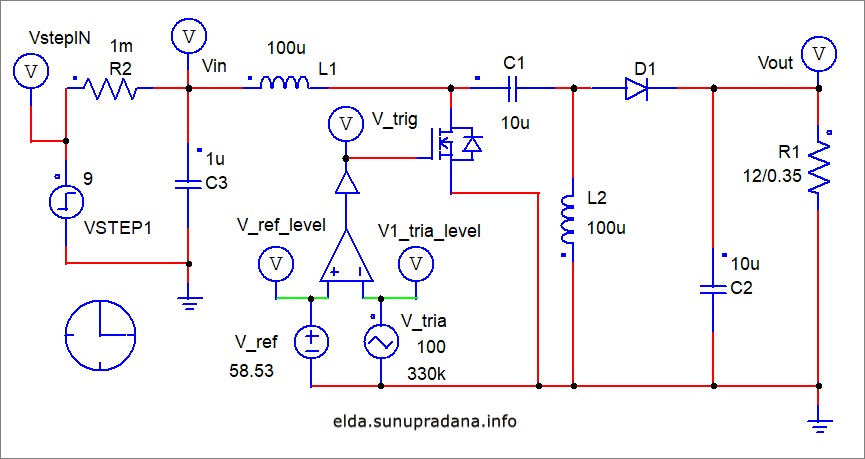 Gambar 18. Pemicuan MOSFET dengan menggunakan comparator.
Gambar 18. Pemicuan MOSFET dengan menggunakan comparator.
Gambar 18 memperlihatkan alternatif lainnya untuk melakukan pemicuan sakelar elektronik berupa MOSFET. Cara yang diperlihatkan tidak asing lagi karena merupakan cara pembangkitan PWM yang klasik, yaitu memanfaatkan komponen comparator. Sinyal segi tiga dibangkitkan dan dihubungkan dengan sisi negatif comparator. Sedangkan nilai duty cycle diwakili oleh nilai teganan DC rata.
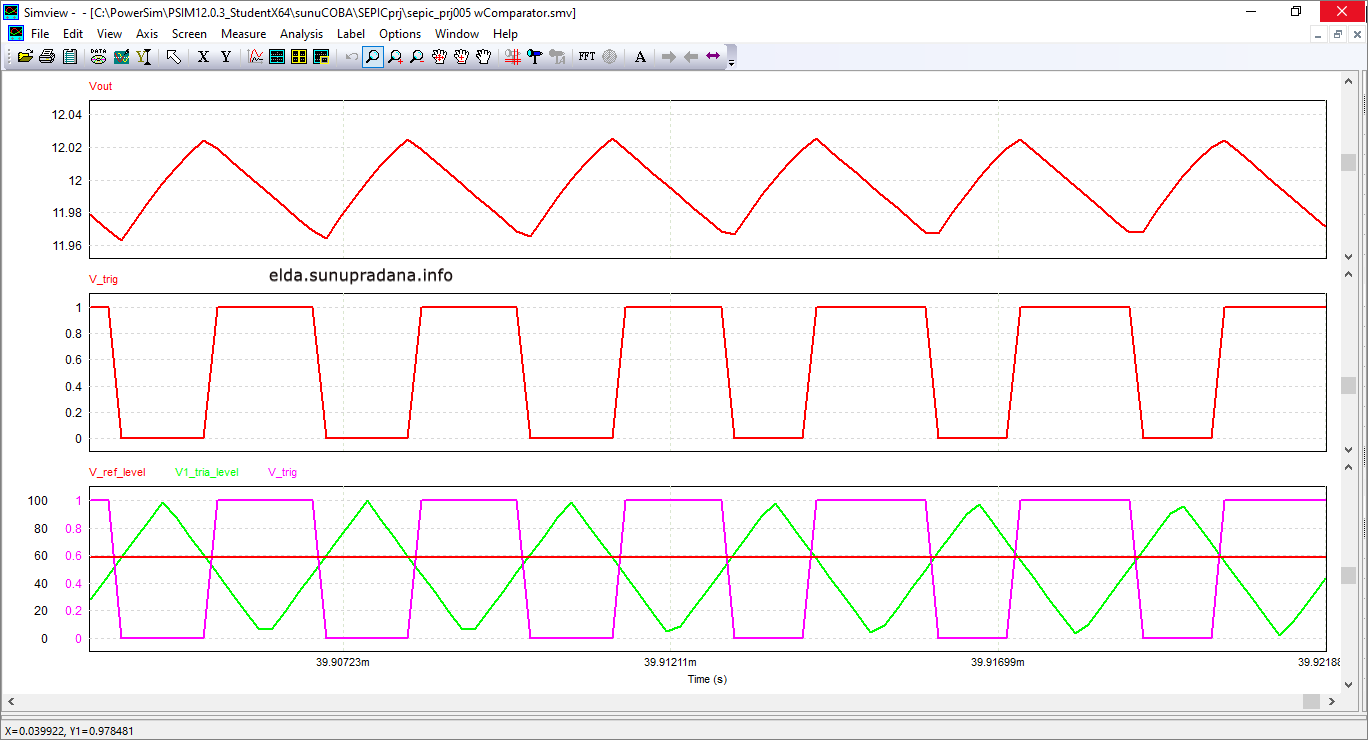 Gambar 19. Hasil simulasi dengan mempergunakan komponen pembanding.
Gambar 19. Hasil simulasi dengan mempergunakan komponen pembanding.
Gambar 19 dapat dipakai untuk mempelajari tentang bagaimana cara kerja komponen comparator membandingkan tingkat tegangan masukan dan menghasilkan tegangan keluaran. Perhatikan juga bahwa tingkat keluaran maksimum on-off controller adalah 1 (satu) V, sekalipun nilai tengangan masukannya jauh lebih tinggi.
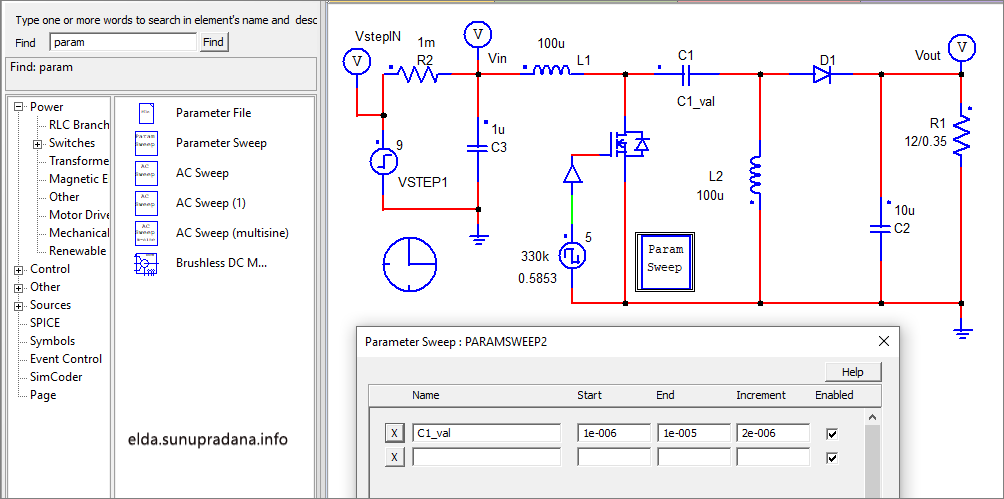 Gambar 20. Penggunaan Paramater Sweep di PSIM.
Gambar 20. Penggunaan Paramater Sweep di PSIM.
Suatu nilai/parameter di simulasi PSIM dapat diubah secara otomatis oleh sistem atas perintah pengguna. Kemudian simulasi akan dilakukan oleh PSIM untuk menghitung perubahan apa saja yang terjadi sebagai akibat dari perubahan satu parameter (atau lebih) itu tadi. Misalnya di Gambar 20 bisa dilihat bahwa saya hanya akan melakukan perubahan satu parameter saja, yaitu nilai kapasitor C1 yang diwaliki oleh variabel C1_val. Nilai ini akan diubah satu persatu secara bertahap, cara ini dinamakan stepping/sweeping. Misalnya di contoh nilai C1_val akan dinaikkan bertahap, mulai dari 1 μF sampai 10 μF, dengan setiap kali perhitungan kenaikan adalah sebesar 2 μF.
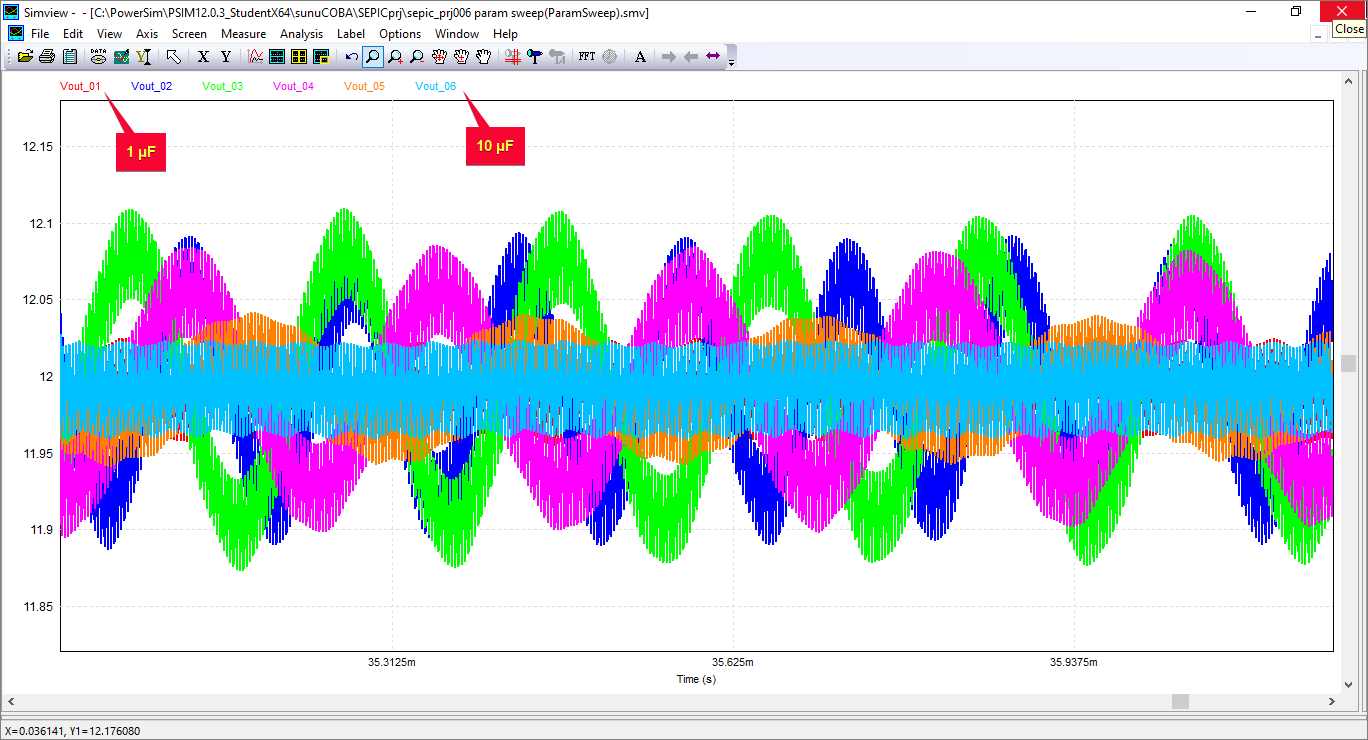 Gambar 21. Hasil simulasi stepping dengan Parameter Sweep di PSIM.
Gambar 21. Hasil simulasi stepping dengan Parameter Sweep di PSIM.
Demikian, di artikel ini coba dipaparkan beberapa contoh alternatif pemicuan sekaligus juga penjelasan unjuk kerja beberapa bagian dari rangkaian SEPIC. Semua simulasi ini pada dasarnya juga bisa dilakukan di simulator lain, misalnya LTspice, meskipun dengan pengaturan yang agak berbeda.
font cache: Ψ α β π θ μ Φ φ ω Ω ° ~ ± ≈ ≠ ≡ ≤ ≥ ∞ ∫ • ∆
 Gambar 2. Simulasi rangkaian SEPIC dengan PSIM.
Gambar 2. Simulasi rangkaian SEPIC dengan PSIM.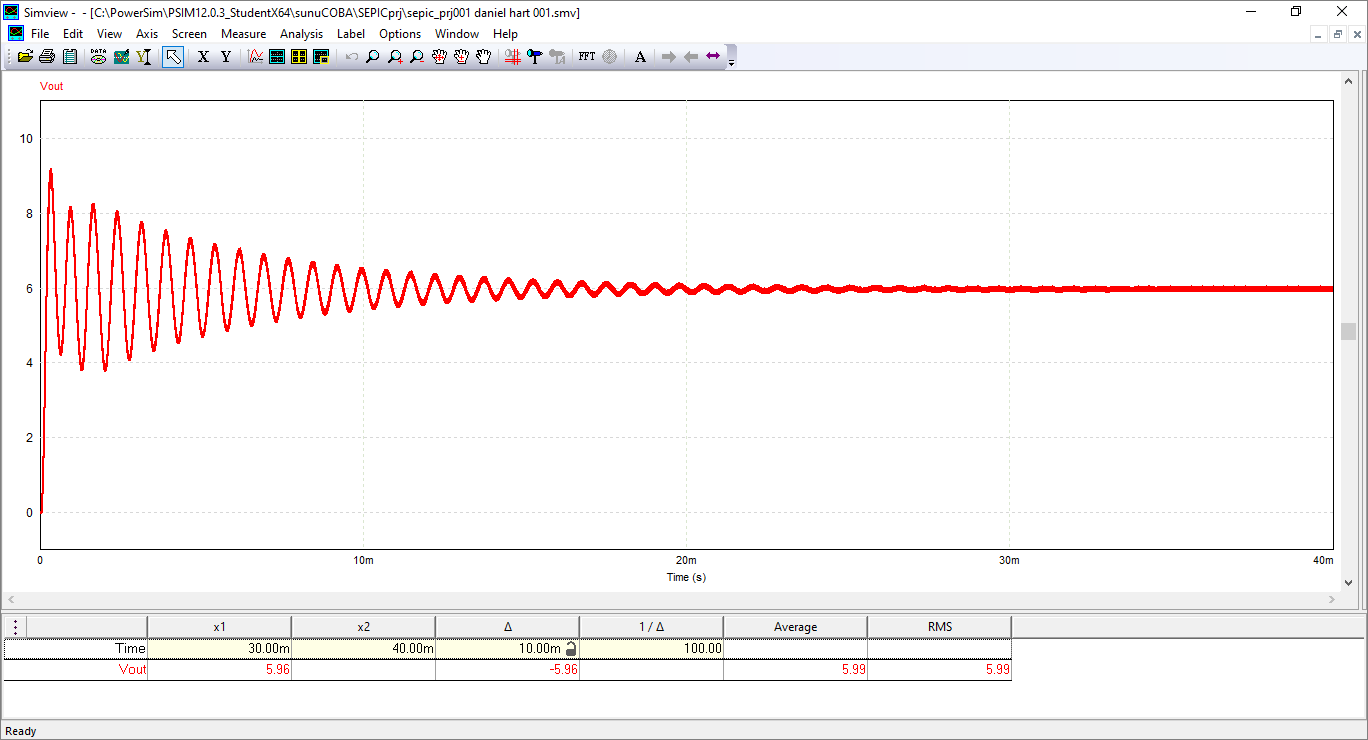
 Gambar 4. Hasil PSD 4.0, nilai tegangan keluaran dari rangkaian/sistem.
Gambar 4. Hasil PSD 4.0, nilai tegangan keluaran dari rangkaian/sistem.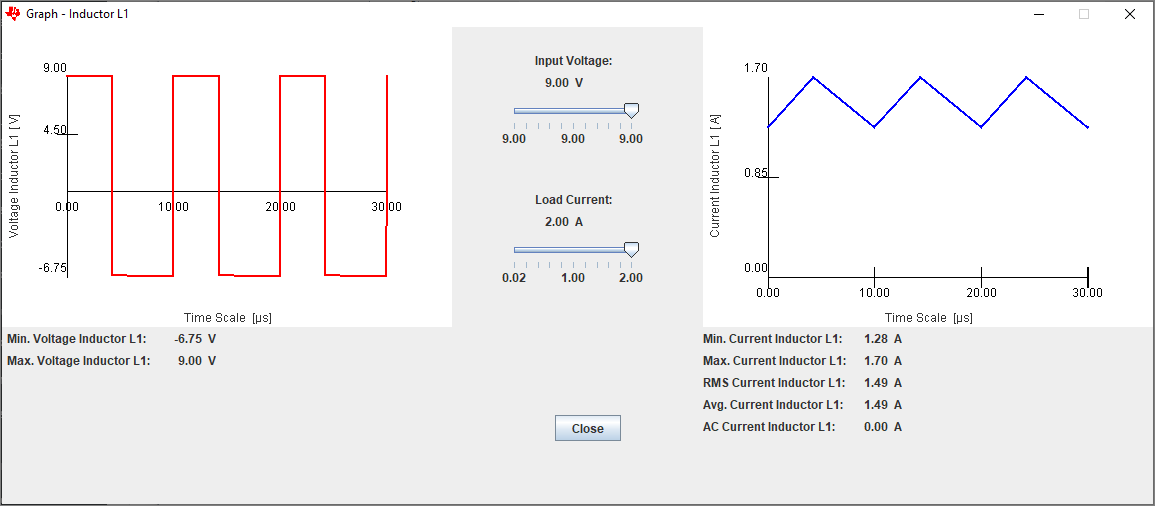 Gambar 5. Nilai arus minimum dan maksimum di induktor L1 dengan arus keluaran rangkaian sebesar 2 A dan tegangan masukan 9 V.
Gambar 5. Nilai arus minimum dan maksimum di induktor L1 dengan arus keluaran rangkaian sebesar 2 A dan tegangan masukan 9 V.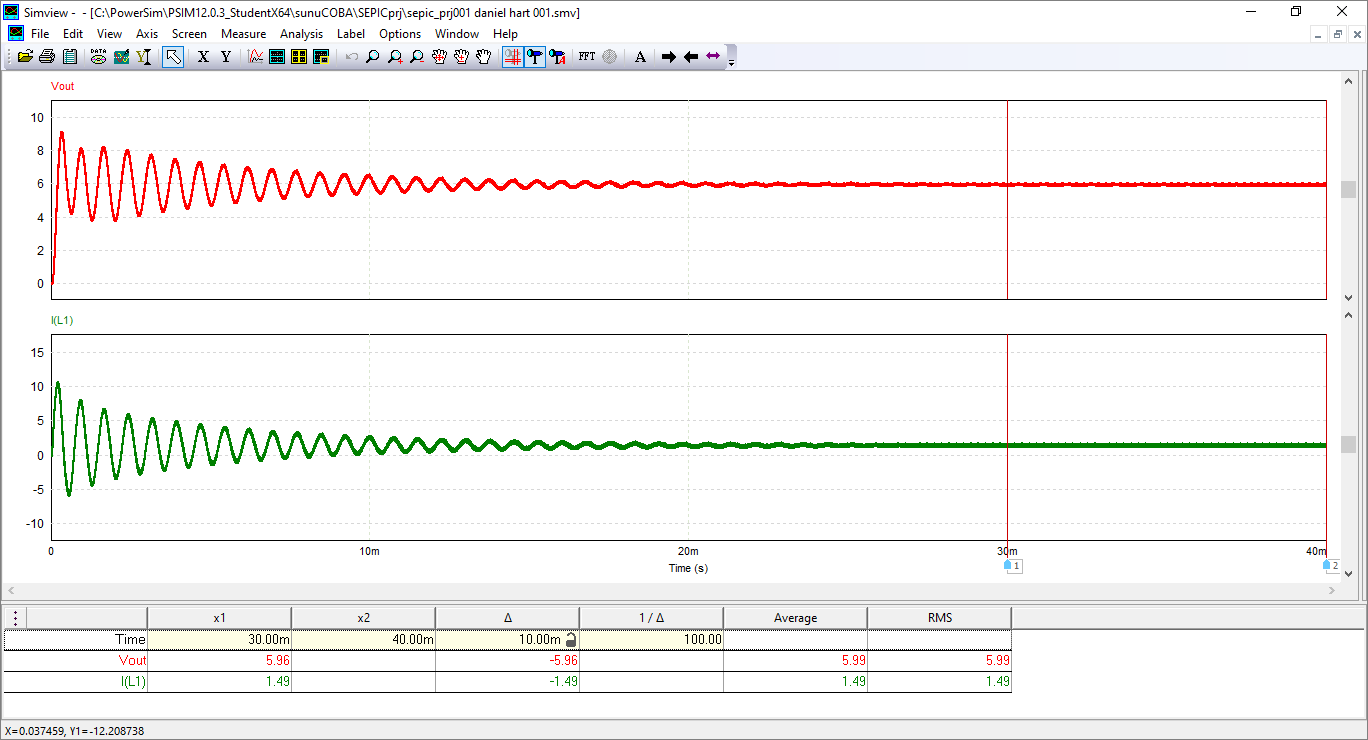 Gambar 6. Nilai arus rata-rata di induktor L1 menurut simulasi PSIM.
Gambar 6. Nilai arus rata-rata di induktor L1 menurut simulasi PSIM.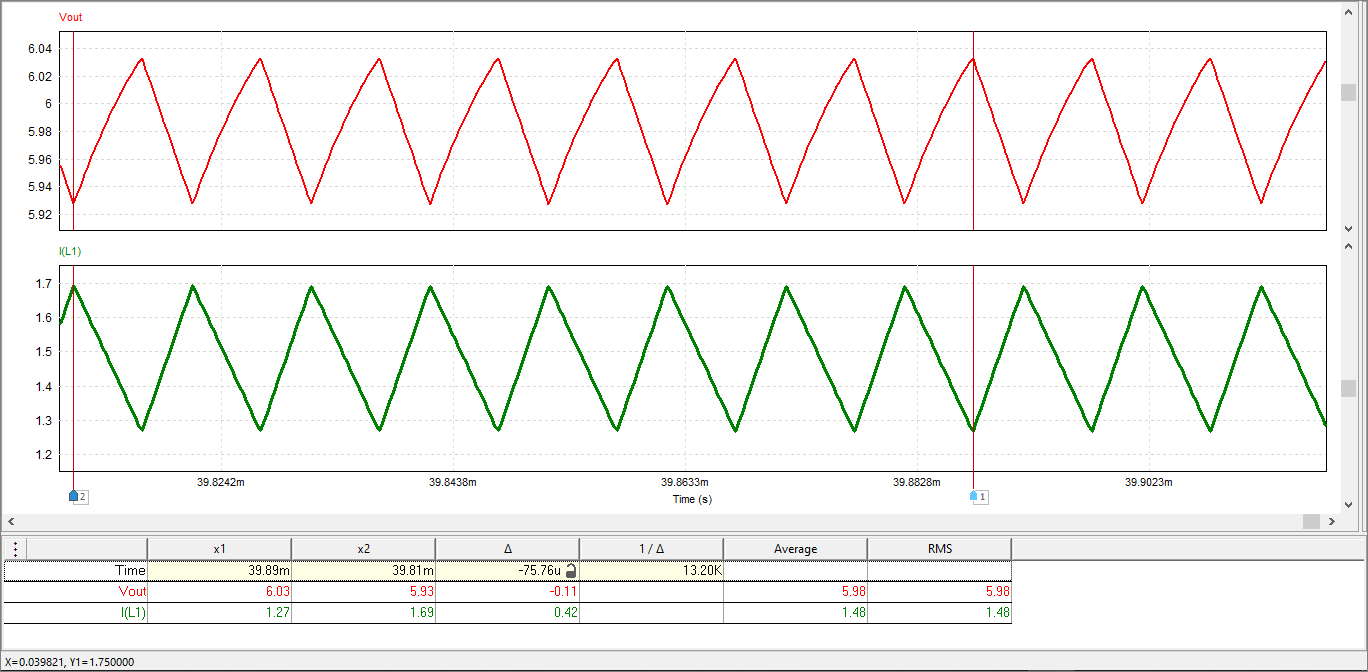 Gambar 7. Zoom in di hasil simulasi PSIM untuk nilai arus di induktor L1.
Gambar 7. Zoom in di hasil simulasi PSIM untuk nilai arus di induktor L1.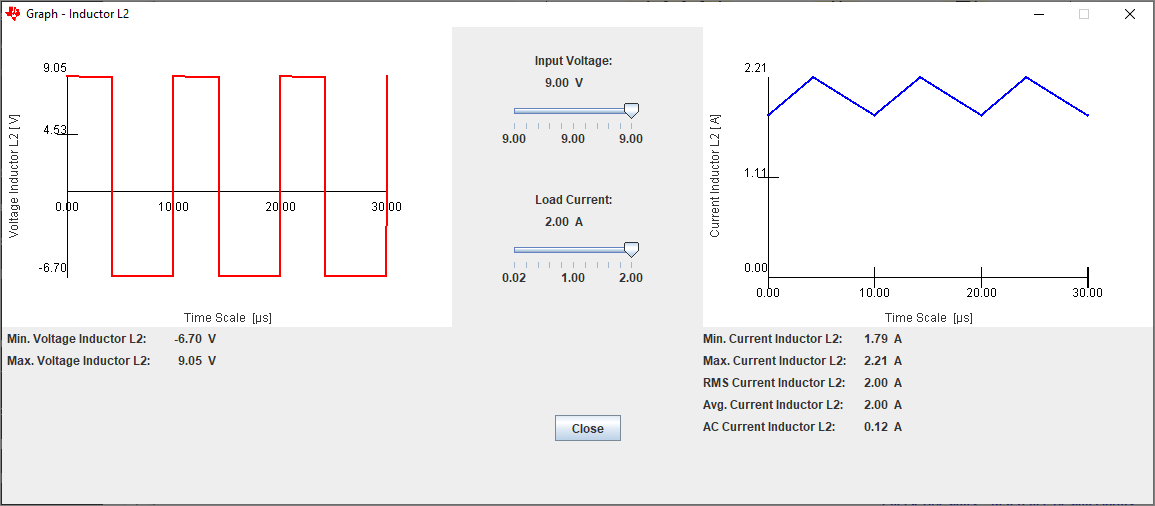
 Gambar 9. Zoom in di hasil simulasi PSIM untuk nilai arus di induktor L2.
Gambar 9. Zoom in di hasil simulasi PSIM untuk nilai arus di induktor L2.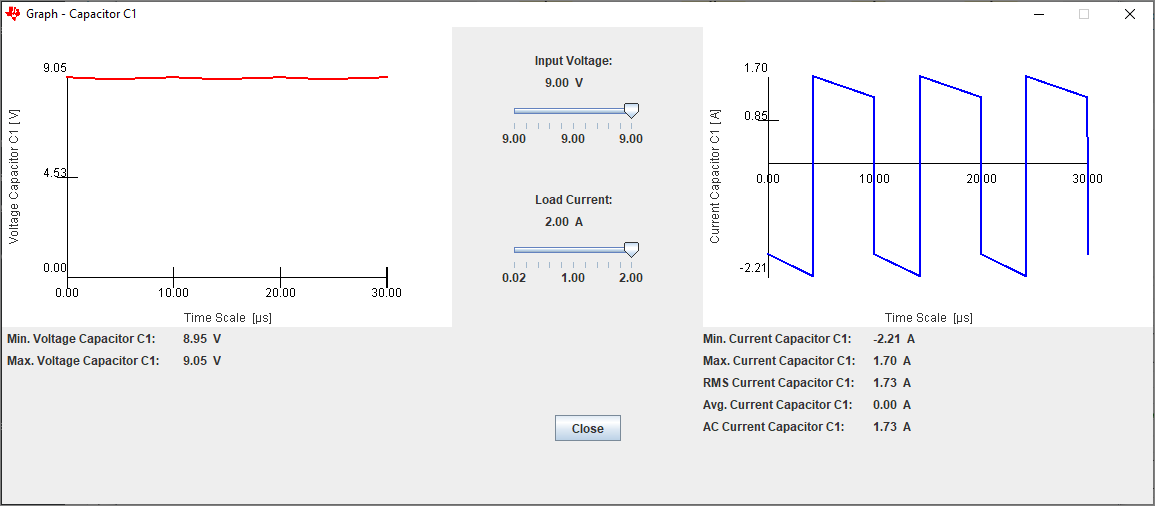
 Gambar 12. Rangkaian simulasi PSIM untuk melihat simulasi penyulutan pada gate MOSFET dan nilai tegangan keluaran rangkaian/sistem.
Gambar 12. Rangkaian simulasi PSIM untuk melihat simulasi penyulutan pada gate MOSFET dan nilai tegangan keluaran rangkaian/sistem.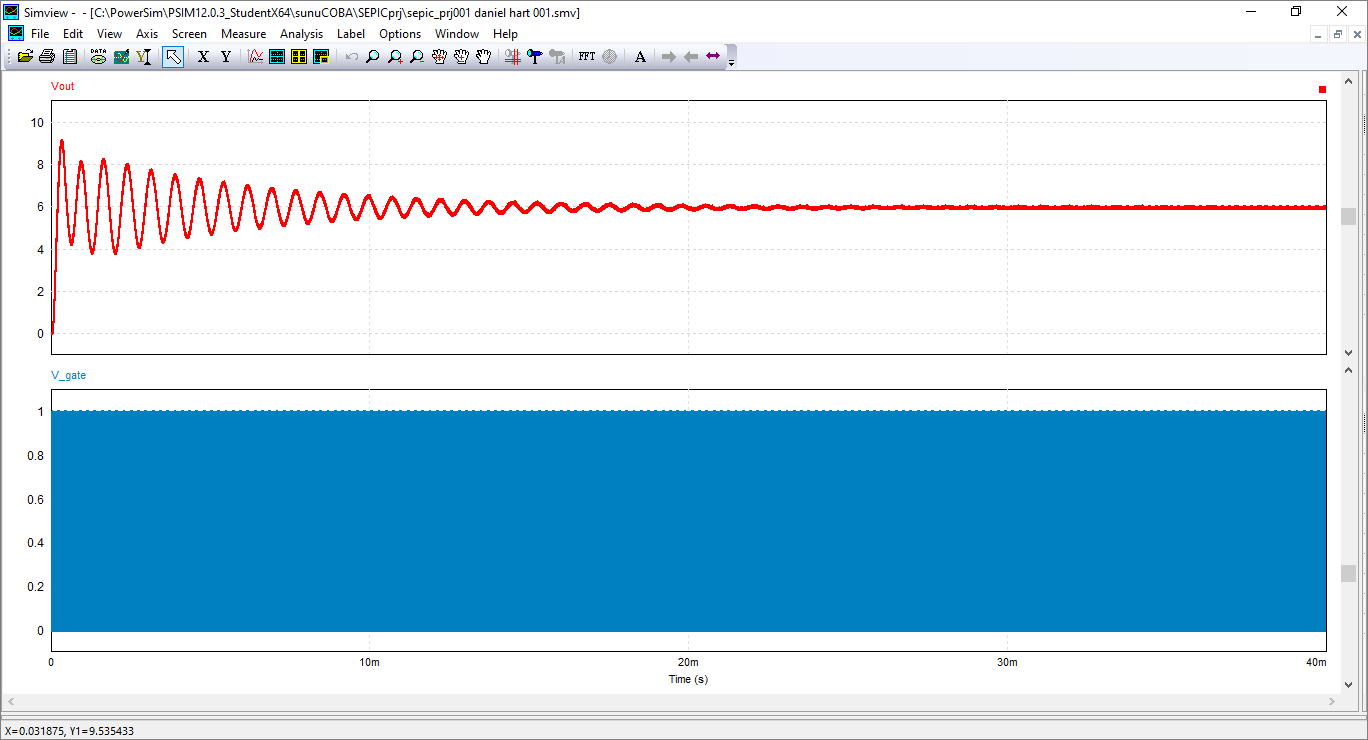
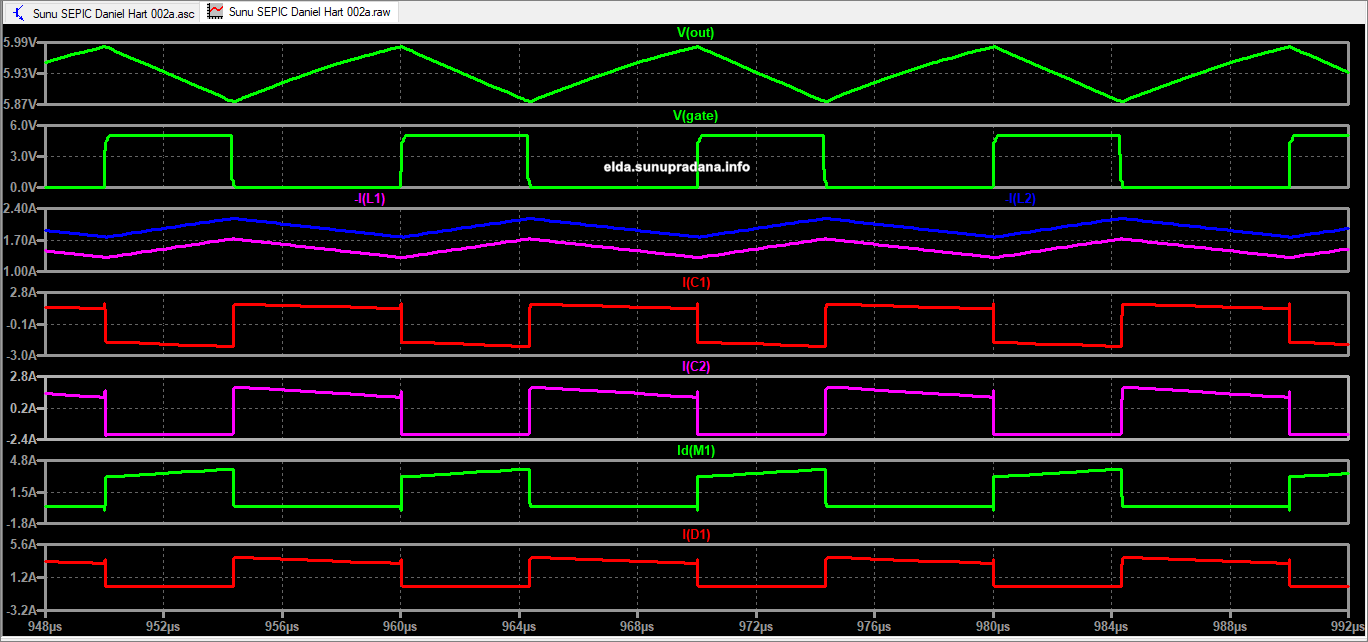
 Gambar 15. Rangkaian simulasi SEPIC di simulator LTspice.
Gambar 15. Rangkaian simulasi SEPIC di simulator LTspice. 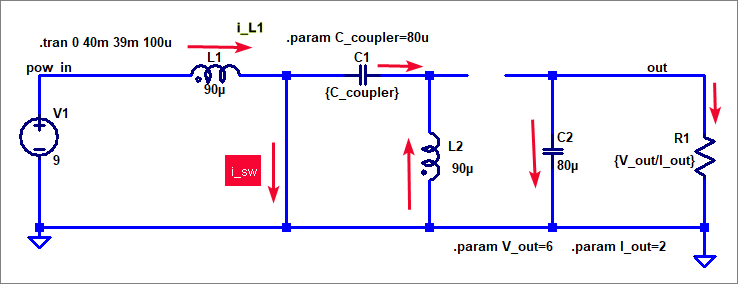 Gambar 16. Kondisi rangkaian SEPIC saat sakelar MOSFET menutup dan diode off.
Gambar 16. Kondisi rangkaian SEPIC saat sakelar MOSFET menutup dan diode off. 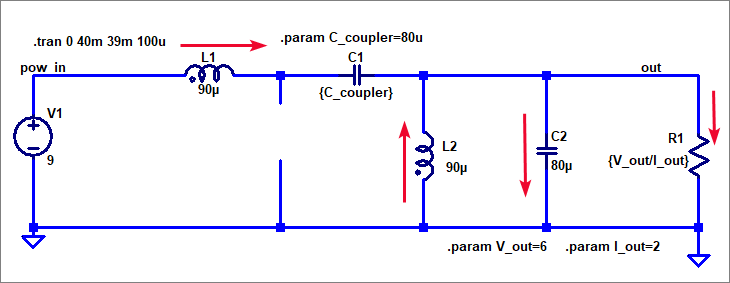
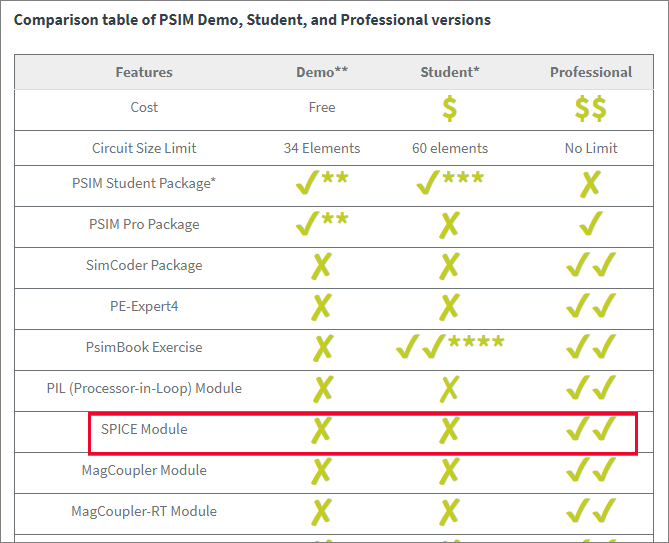 Gambar 19. Perbedaan fasilitas pada versi-versi PSIM.
Gambar 19. Perbedaan fasilitas pada versi-versi PSIM.











 Gambar 1.
Gambar 1. Gambar 2.
Gambar 2. Gambar 3.
Gambar 3. Gambar 4.
Gambar 4. Gambar 5.
Gambar 5. Gambar 6.
Gambar 6. Gambar 7.
Gambar 7. Gambar 8.
Gambar 8. Gambar 9.
Gambar 9. Gambar 10.
Gambar 10.
 Gambar 14.
Gambar 14. Gambar 15.
Gambar 15.
 Gambar 17.
Gambar 17.
 Gambar 19.
Gambar 19.
 Gambar 21.
Gambar 21.
 Gambar 23.
Gambar 23.
 Gambar 25.
Gambar 25.
 Gambar 27.
Gambar 27.
 Gambar 29.
Gambar 29.
 Gambar 31.
Gambar 31.