Mengenai EMR (Electromechanical Relay) telah dicatatkan di dua post terdahulu, di link ini dan di link ini. Dalam post ini akan diungkap mengenai penggunaan SSR (Solid State Relay).
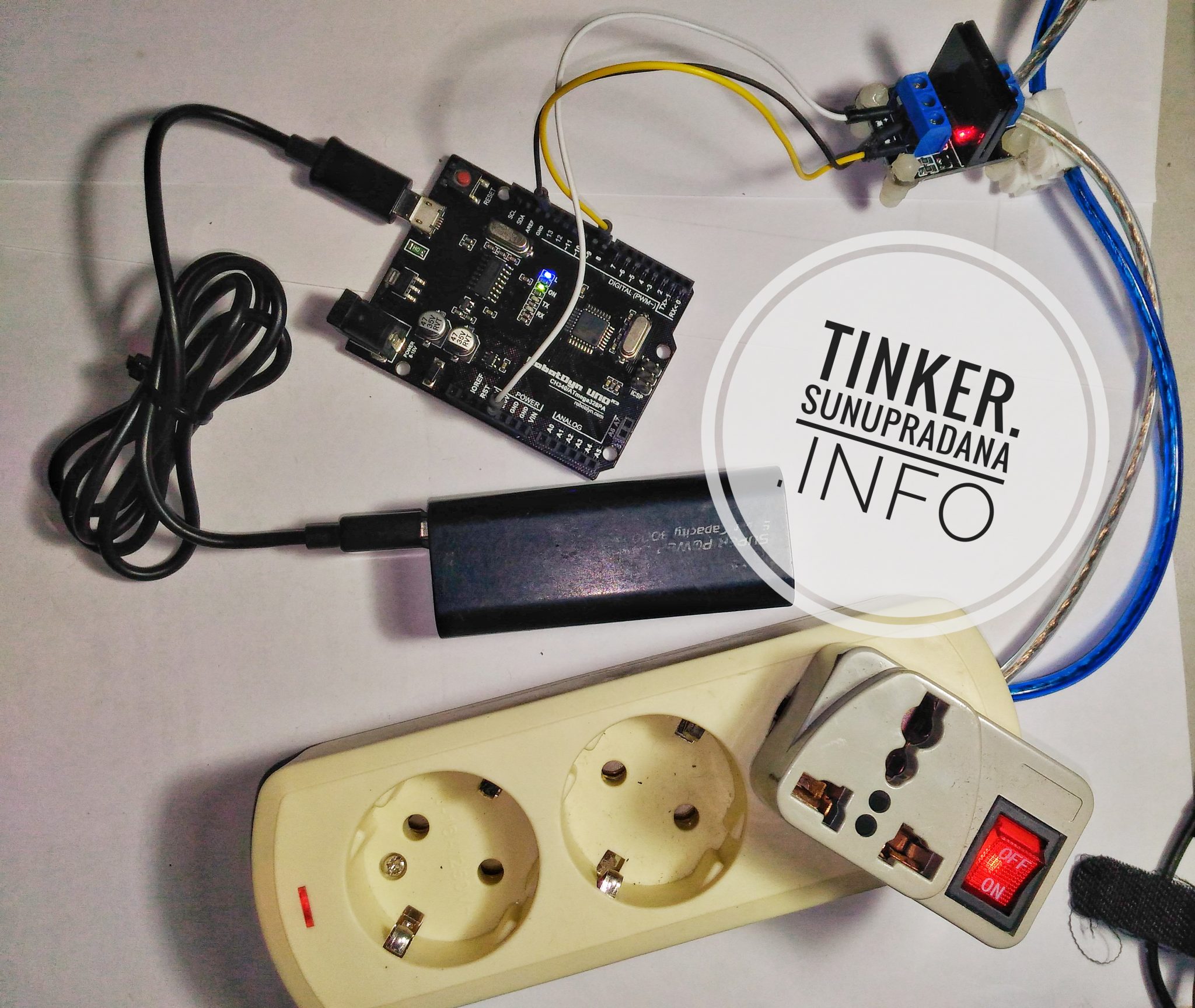
Ada banyak tipe dan instalasi SSR, salah satu modul yang cukup mudah ditemui dalam bidang elektronika adalah seperti pada Gambar 1 dan Gambar 2.
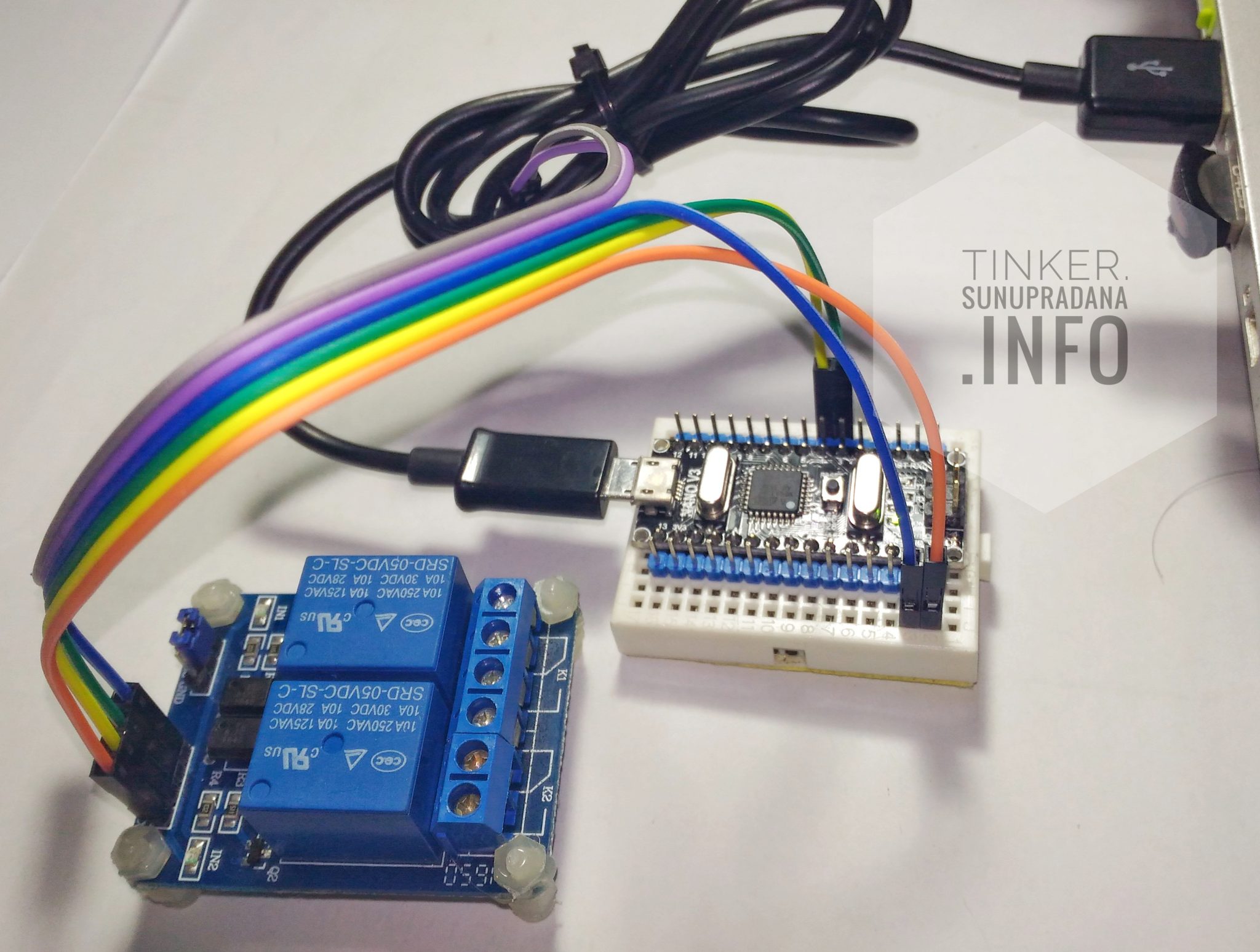
Gambar 1.
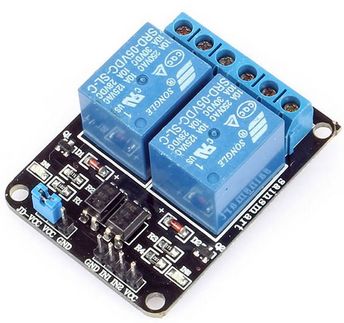
Gambar 2. [sumber]
 Gambar 3. [sumber]
Gambar 3. [sumber]
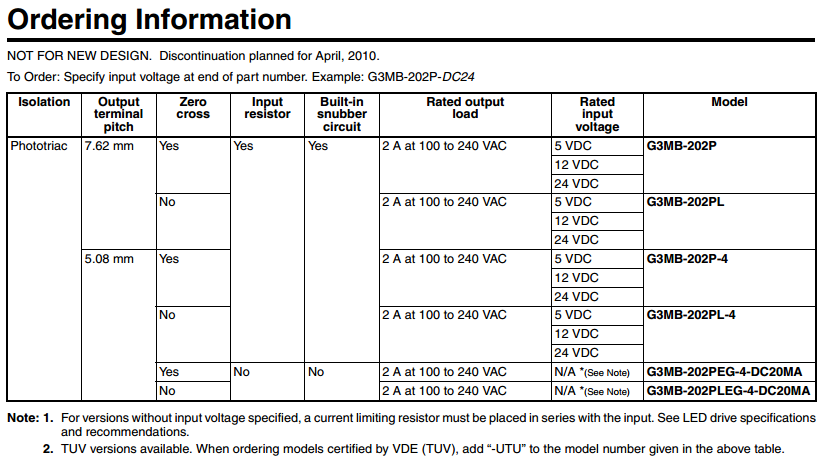
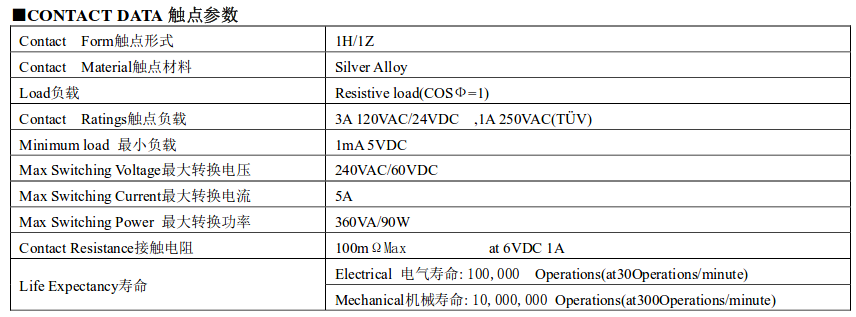
Pada tabel di Gambar 3 (screenshot dari datasheet) bisa dilihat bahwa tipe G3MB ini sudah discontinued, artinya secara resmi sebenarnya produksinya telah dihentikan oleh produsennya. Di sana tabel yang sama juga bisa dilihat bahwa ada dua jenis SSR tipe ini, yang menggunakan zero crossing dan yang tidak (disebut juga random turn-on). Jenis G2MB-202P adalah jenis yang di dalamnya terdapat zero cross.
 Gambar 4. [sumber]
Gambar 4. [sumber]
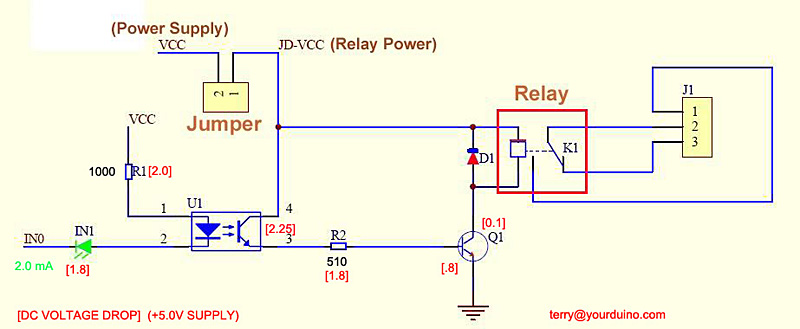
Sekadar sebagai gambaran untuk mempermudah membayangkan cara kerja SSR, dapat dilihat rangkaian pada Gambar 4. Prinsip/dasar kerjanya tidaklah rumit, triac berfungsi sebagai sakelar utama, dibantu oleh phototriac sebagai sakelar yang menghubungkan antara input dengan sakelar utama. Phototriac memberikan isolasi galvanis, artinya input (misalnya dari Arduino) tidak terhubung langsung secara elektrikal dengan triac.
Jika suatu saat diperlukan atau dikehendaki prinsip blok rangkaian pada Gambar 4 bisa diwujudkan dengan komponen-komponen distrik seperti pada Gambar 5. Namun untuk banyak keperluan modul SSR yang sudah dalam bentuk yang terintegrasi lebih memudahkan, seperti pada Gambar 6 yang merupakan komponen utama dari papan pada Gambar 1 dan Gambar 2.
Gambar 5. [sumber]
 Gambar 6. [sumber]
Gambar 6. [sumber]
Gambar 7. [sumber]
Rangkaian papan SSR pada [ps2id url=’#gambar2′ offset=’300′]Gambar 2[/ps2id] dapat lebih mudah dipahami dengan melihat pada Gambar 7. Semua komponen terdapat di papan SSR (lihat Gambar 2), tidak diperlukan lagi komponen tambahan. Tiga masukan berasal dari pengendali digital, semisal papan Arduino M0 atau GPIO Raspberry Pi atau papan TI Launchpad. Polaritas catu daya jangan sampai terbalik meskipun di papan telah dipasang diode.
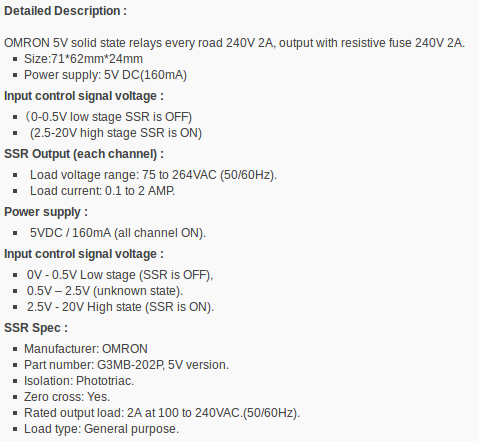 Gambar 8. Ringkasan spesifikasi papan SSR Omron G3MB [sumber]
Gambar 8. Ringkasan spesifikasi papan SSR Omron G3MB [sumber]
Gambar-gambar berikut adalah contoh penerapan papan SSR.
 Gambar 9. [sumber]Gambar 10. [sumber]Gambar 11. [sumber]
Gambar 9. [sumber]Gambar 10. [sumber]Gambar 11. [sumber]
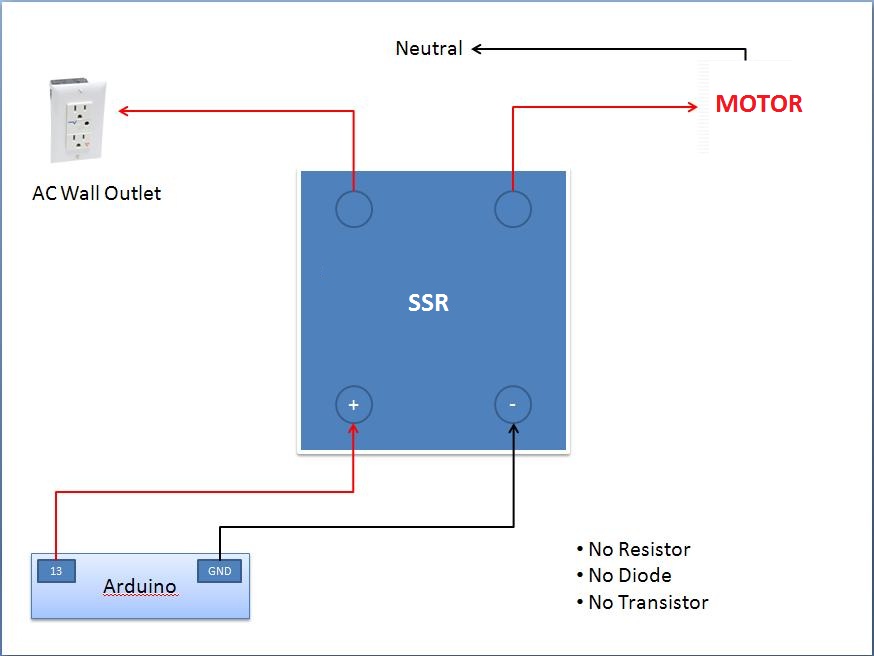
Uji coba untuk melakukan pemrograman pengujian awal bisa dilakukan dengan konfigurasi DC seperti pada Gambar 11. Meski harus tetap diingat bahwa SSR ini adalah untuk beban AC (lihat [ps2id url=’#gambar6′ offset=’300′]Gambar 6[/ps2id]), bukan beban DC. Sehingga meskipun SSR sudah dimatikan (off) tetap ada aliran arus DC ke beban.
const uint8_t IND_LED_PIN = LED_BUILTIN;
const uint16_t DELAY02 = 2000;
#define BLINK_DELAY 500
#define SSR_ON HIGH
#define SSR_OFF LOW
#define LED_SRC 7
#define CH1 8
#define CH2 9
void safeSSRinit(void)
{
digitalWrite(CH1, LOW);
digitalWrite(CH2, LOW);
delay(100);
pinMode(CH1, OUTPUT);
pinMode(CH2, OUTPUT);
}
void ssrTest001(void)
{
digitalWrite(CH1, LOW);
delay(2000);
digitalWrite(CH1, HIGH);
delay(2000);
digitalWrite(CH2, LOW);
delay(2000);
digitalWrite(CH2, HIGH);
delay(2000);
}
void ssrTest002(void)
{
digitalWrite(CH1, SSR_ON);
delay(DELAY02);
digitalWrite(CH1, SSR_OFF);
delay(DELAY02);
}
void testPola01(void)
{
digitalWrite(LED_SRC, HIGH);
ssrTest002();
digitalWrite(LED_SRC, LOW);
}
void testPola02(void)
{
digitalWrite(LED_SRC, HIGH);
digitalWrite(CH1, SSR_ON);
delay(DELAY02);
digitalWrite(LED_SRC, LOW);
delay(DELAY02);
digitalWrite(CH1, SSR_OFF);
delay(DELAY02);
digitalWrite(LED_SRC, LOW);
}
void testPola03(void)
{
delay(DELAY02);
digitalWrite(IND_LED_PIN, HIGH);
delay(DELAY02);
digitalWrite(CH1, SSR_ON);
delay(DELAY02);
digitalWrite(LED_SRC, HIGH);
delay(DELAY02);
}
void testPola04(void)
{
digitalWrite(LED_SRC, LOW);
delay(DELAY02);
digitalWrite(CH1, SSR_ON);
delay(DELAY02);
digitalWrite(LED_SRC, HIGH);
delay(DELAY02);
digitalWrite(CH1, SSR_OFF);
delay(DELAY02);
digitalWrite(LED_SRC, LOW);
}
void setup(void)
{
safeSSRinit();
delay(10);
pinMode(LED_SRC, OUTPUT);
digitalWrite(LED_SRC, LOW);
pinMode(IND_LED_PIN, OUTPUT);
digitalWrite(IND_LED_PIN, LOW);
delay(1000);
digitalWrite(IND_LED_PIN, HIGH);
delay(1000);
// ssrTest001();
for (int i = 0; i < 3; ++i)
{
/* code */
// ssrTest002();
// testPola01();
// testPola02();
// testPola03();
testPola04();
}
digitalWrite(IND_LED_PIN, LOW);
}
void loop(void)
{
}
Dengan kode yang sama, bisa dilakukan pengujian untuk beban AC seperti pada Gambar 12 dengan daya AC, tegangan listrik sebesar kurang-lebih 220 V dari jala-jala PLN. Hasil unjuk kerja akan berbeda dengan percobaan pada Gambar 11 (beban DC). Pada pengendalian beban AC, pemutusan berlangsung seperti yang seharusnya sebab kondisi latching dan (terutama) holding akan terhenti saat nilai arus turun menuju crossing.
[su_panel color=”#010101″ border=”0px none #cccccc” shadow=”0px 0px 0px #ffffff” text_align=”center”]Solid State Relay G3MB by Sunu Pradana on Scribd
[/su_panel]
Untuk mempelajari lebih lanjut tentang pengoperasian SSR, silakan membaca dokumen dan artikel berikut:
- Solid-state relay
- Solid State Relay Primer
- Solid State Relay
- Opto Coupled Devices
- Solid State Relays Overview
- Omega Solid State Relay
- Technical Explanation for Solid-state Relays
- Introduction To Solid State Relays
- Solid State Relays – Application Data
- Explanation of Solid State Relay (optical-coupled MOS FET) Specifications
- Solid State Relays:Product Guide
- Sold-State Relays Technical Manual
- Omron Solid-state Relays
- Opto 22 Solid-State Relays
- Switch
- Solid State Relay - 40A (3-32V DC Input)
 Gambar 1.
Gambar 1.
 Gambar 3. [
Gambar 3. [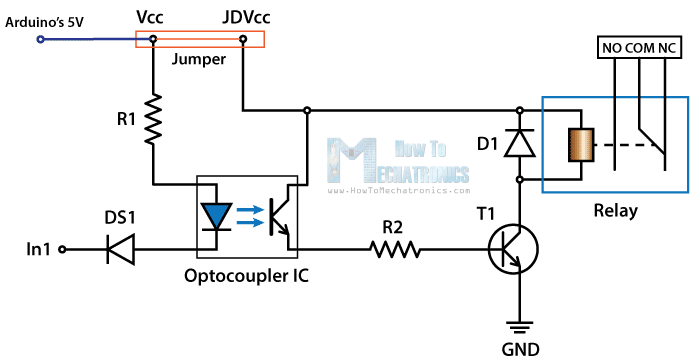 Gambar 4. Menggunakan catu daya Arduino [
Gambar 4. Menggunakan catu daya Arduino [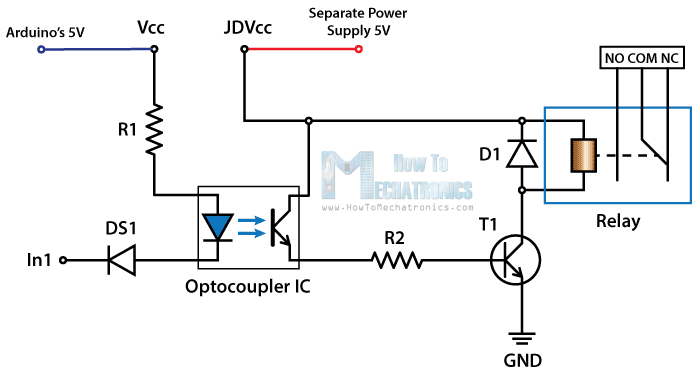 Gambar 5. Menggunakan catu daya terpisah (sambungkan juga GND) [
Gambar 5. Menggunakan catu daya terpisah (sambungkan juga GND) [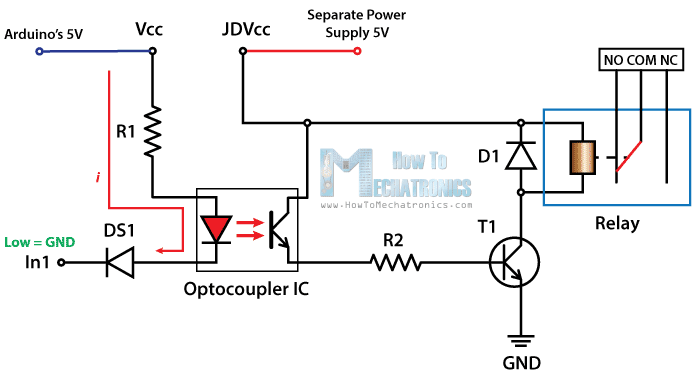 Gambar 6. Papan sistem menggunakan active-low [
Gambar 6. Papan sistem menggunakan active-low [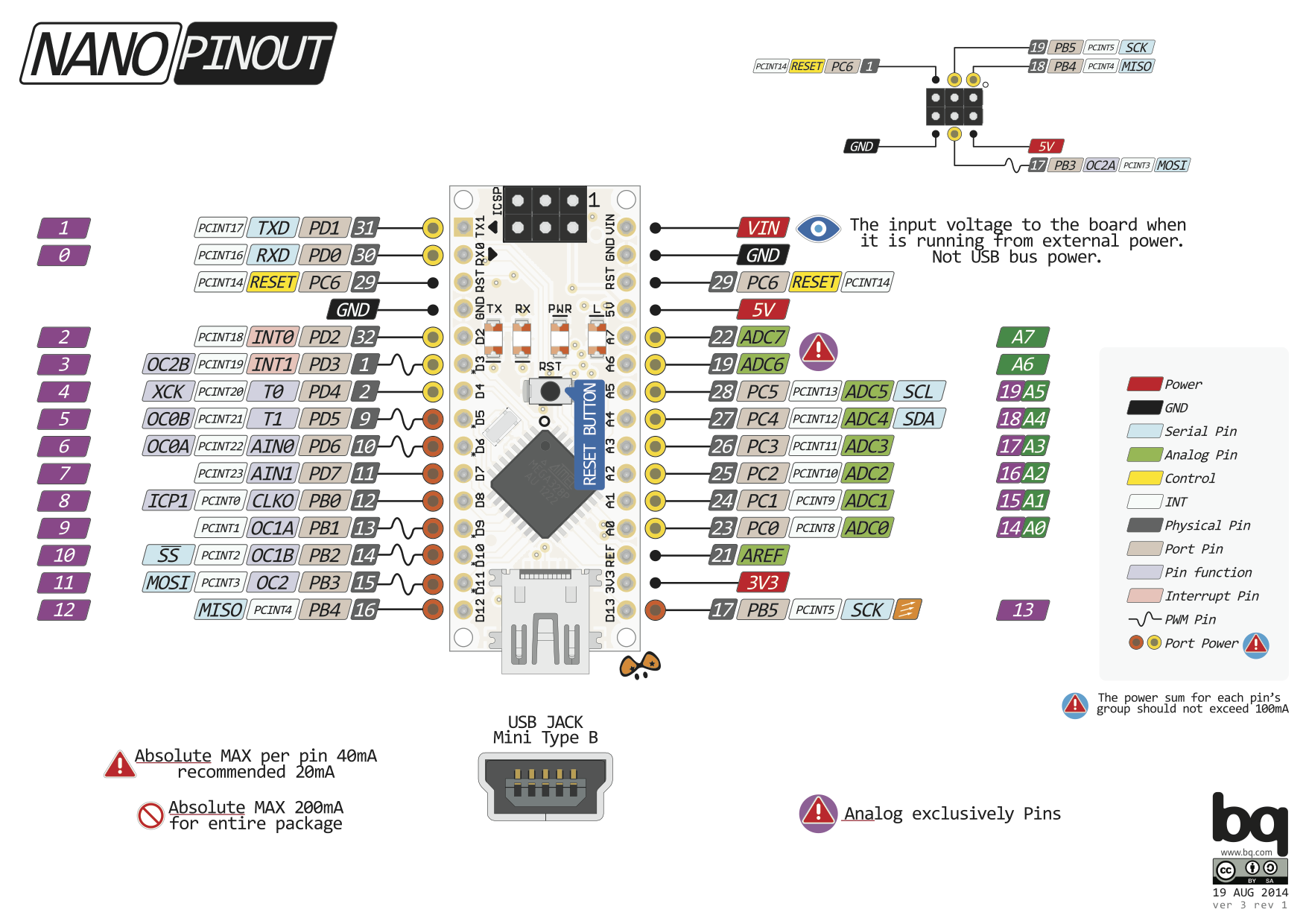
 Gambar 3. [
Gambar 3. [